Aquesta pàgina es genera automàticament a partir de la presentació MARP
4-busqueda_local_i_satisfaccio_restriccions_marp.md. No l’edites directament.
4. Búsqueda local i satisfacció de restriccions
Models d’intel·ligència artificial
Optimització
Definició
- Fins ara hem plantejat els problemes com a la cerca d’un camí en un espai d’estats.
- A vegades aquesta cerca no és possible, o no és el que volem.
- Podem voler trobar un estat que satisfaci unes restriccions o que maximitzi o minimitzi una funció
- Pot no ser possible representar el camí en l’espai d’estats.
- O que no ens interessi el camí, sinó només l’estat final.
- En aquests casos, pot ser fàcil trobar una solució, encara que no sigui la millor.
- Aquesta solució es pot refinar amb tècniques de cerca local.
Usos reals
- Els algorismes d’optimització són molt utilitzats en problemes reals.
- Alguns exemples:
- Optimització de xarxes neuronals
- Optimització de circuits electrònics
- Optimització de problemes de planificació
- Optimització de problemes de logística
- Optimització de problemes de disseny
- Optimització de problemes de fabricació
Problemes NP-complets
- Els problemes que no es poden resoldre amb una complexitat polinòmica s’anomenen problemes NP-complets.
- Aquests problemes són intractables, ja que no es coneix cap algorisme que els resolga en un temps raonable.
- Frequentment, els problemes d’optimització són problemes NP-complets, perquè cal explorar tot l’espai d’estats per a trobar la solució òptima.
- Aixó fa que no siga possible trobar la solució òptima en un temps raonable.
Búsqueda local
Característiques (I)
- La búsqueda local no manté una estructura de dades que representi l’espai d’estats.
- En lloc d’això, genera un estat inicial i genera estats successors a partir d’aquest.
- Aquests estats successors es generen modificant l’estat actual.
- Les técniques de búsqueda local també s’anomenen metaheurístiques.
Característiques (II)
- Utilitzarem una funció d’avaluació que maximitzirà un valor. Representa la qualitat de l’estat, no el cost. Podem ponderar els valors de les variables segons les característiques de l’estat que volem potenciar.
- Avantatges:
- Utilitza poca memòria i poca CPU.
- Permeten trobar solucions raonables en espais d’estats molt grans.
Definició del problema
class ProblemaBusquedaLocal(object):
def __init__(self, inicial=None, **kwds):
self.__dict__.update(inicial=inicial, **kwds)
def estats_successors(self, estat): raise NotImplementedError
def es_solucio(self, estat): raise NotImplementedError
def funcio_avaluacio(self, state): return NotImplementedError
def __repr__(self):
return '{}({!r})'.format(
type(self).__name__, self.inicial)
Definició del problema
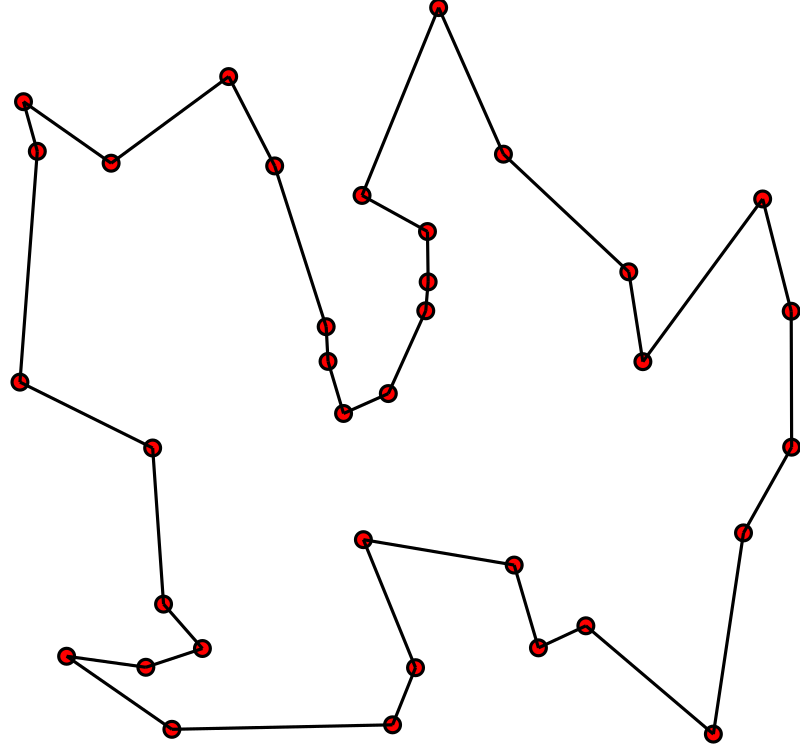
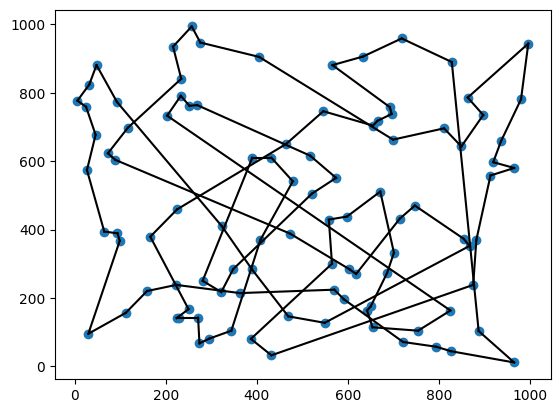
Exemple: Viajant de comerç (I)
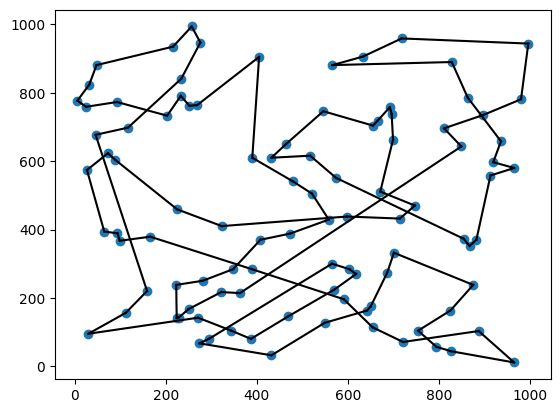
- Tenim un mapa amb ciutats i volem trobar el camí més curt que passi per totes les ciutats, per tornar a la ciutat inicial.
- Les variables són les ciutats i els dominis són les posicions.
- Les restriccions són que no hi pugui haver dues ciutats en la mateixa posició.
- Les solucions són les permutacions de les ciutats que satisfan les restriccions.
Definició del problema
Exemple: Viajant de comerç (II)
- El nombre d’estats que cal explorar és molt gran.
- Per a 10 ciutats, el nombre d’estats és de \(10! = 3.628.800\).
- El plantejarem com a búsqueda local.
- No ens cal una estructura de dades que representi l’espai d’estats.
- Solament ens cal un estat inicial i una funció d’avaluació.
- Anirem modificant l’estat inicial fins que no puguem millorar més.
- Utilitzarem una funció d’avaluació que millorá quan menor siga el valor del camí.
- A continuació podem veure una possible implementació.
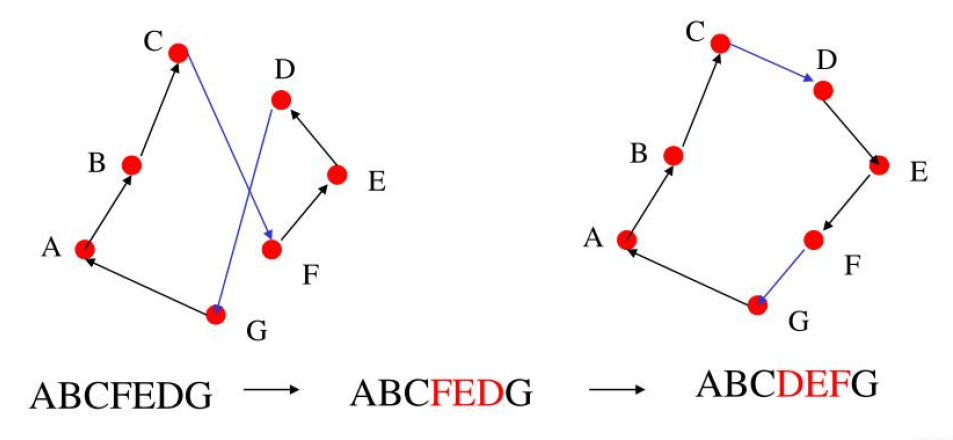
Exemple: Viajant de comerç - Implementació (I)
class TSP(ProblemaBusquedaLocal):
def estats_successors(self, estat):
successors = []
for i in range(len(estat)):
for j in range(i + 1, len(estat)):
successor = estat.copy()
successor[i], successor[j] = successor[j], successor[i]
successors.append(successor)
return successors
def distancia(self, ciutat1, ciutat2):
# Formula de la distancia euclidiana
return math.sqrt((ciutat1[0] - ciutat2[0]) ** 2 + (ciutat1[1] - ciutat2[1]) ** 2)
Exemple: Viajant de comerç - Implementació (II)
def funcio_avaluacio(self, estat):
distancia = 0
for i in range(len(estat)):
distancia += self.distancia(estat[i], estat[(i + 1) % len(estat)])
return 1/distancia
@classmethod
def genera_estat_inicial(cls, ciutats):
return random.sample(ciutats, len(ciutats))
ciutats = [
(random.randint(0, 1000), random.randint(0, 1000)) for _ in range(100)
]
tsp = TSP(inicial=TSP.genera_estat_inicial(ciutats), ciutats=ciutats)
Tornada enrere
- La tècnica de tornada enrere o backtracking és una tècnica de cerca local.
- Es basa en explorar l’espai d’estats fins a trobar una solució.
- Si no es troba una solució, es torna enrere i es modifica l’últim estat.
- Aquesta tècnica garanteix trobar la solució òptima però pot ser molt lenta.
Implementació
def backtracking(problema):
cua = [problema.inicial]
visitats = set()
millor_estat, millor_fitness = None, float('inf')
while cua:
estat = cua.pop(0)
if problema.es_solucio(estat) and problema.funcio_avaluacio(estat) > millor_fitness:
millor_estat = estat
millor_fitness = problema.funcio_avaluacio(estat)
if str(estat) not in visitats:
visitats.add(str(estat))
successors = problema.estats_successors(estat)
for successor in successors:
if es_compleixen_restriccions(successor):
cua.append(successor)
return millor_estat
Execució
ciutats = [
(random.randint(0, 1000),
random.randint(0, 1000))
for _ in range(7)
]
tsp = TSP(
inicial=TSP.genera_estat_inicial(ciutats),
ciutats=ciutats
)
solucio = backtracking(tsp)
Millor fitness: 4030.1303415460707
...
Millor fitness: 2718.3988057871697
3min 52s ± 24.7 s per loop
(mean ± std. dev. of 7 runs, 1 loop each)
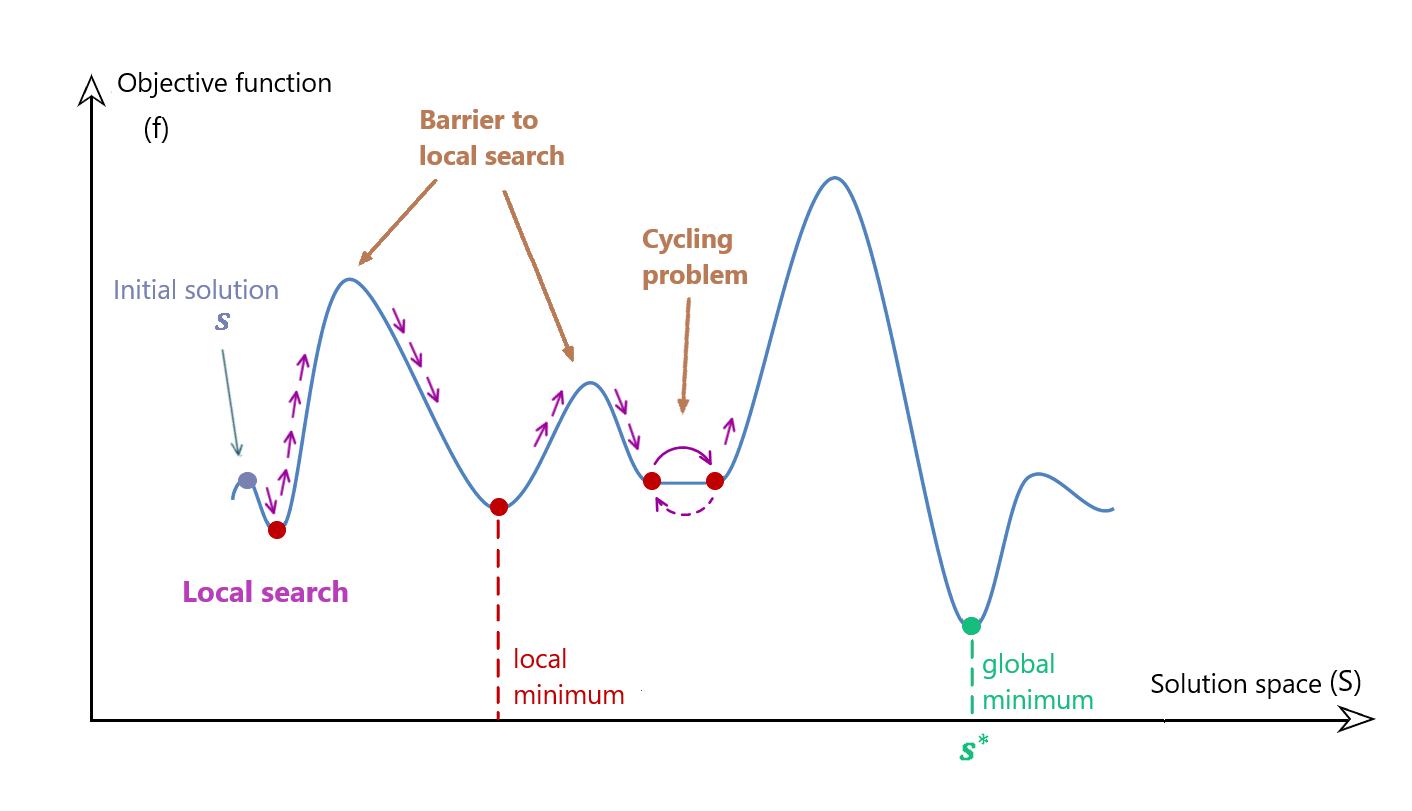
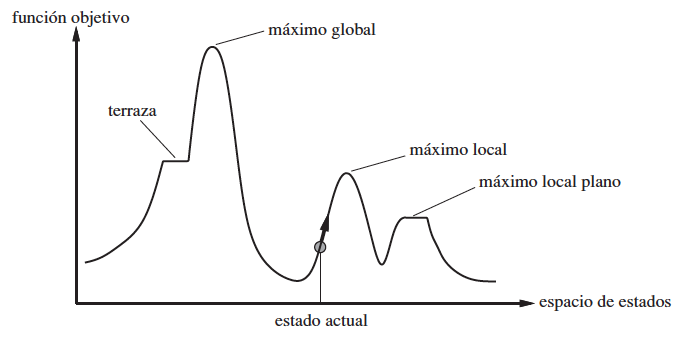
Algorisme d’Escalada
- L’algorisme d’escalada o Hill Climbing és l’algorisme de cerca local més senzill.
- Si plantegem els estats com a punts en un espai,
- Sent l’alçada de cada punt el valor de la funció a optimitzar,
- l’algorisme consisteix a moure’ns cap a punts més alts.
- Si deixem de pujar entendrem que hem arribat al màxim global i hem trobat la solució.
Implementació
def hill_climbing(problema, iteracions=10000):
estat = problema.inicial
fitness = problema.funcio_avaluacio(estat)
for _ in range(iteracions):
successors = problema.estats_successors(estat)
if not successors:
break
successor = min(successors, key=problema.funcio_avaluacio)
fitness_succ = problema.funcio_avaluacio(successor)
if fitness_succ > fitness:
print(f"{fitness_succ} > {fitness}")
estat = successor
fitness = fitness_succ
else:
break
return estat
Execució
ciutats = [
(random.randint(0, 1000),
random.randint(0, 1000))
for _ in range(100)
]
tsp = TSP(
inicial=TSP.genera_estat_inicial(ciutats),
ciutats=ciutats
)
solucio = hill_climbing(tsp)
51442.77444568607 > 54092.0949691196
...
41.1 s ± 6.22 s per loop
(mean ± std. dev. of 7 runs, 1 loop each)
Inline:
2.13 s ± 922 ms per loop
(mean ± std. dev. of 7 runs, 1 loop each)
Consum de memòria
- Un dels problemes que tenen els algorismes de búsqueda local que s’utilitza molta memòria.
- Cal mantenir una estructura de dades que representi els espais successors
- Podem millorar l’eficiència del algorisme de recuit simulat eliminant aquesta estructura de dades.
- Per això, no generarem estats successors nous.
- En lloc d’això, modificarem l’estat actual (
inline) per generar el successor i, si no millora, desfarem els canvis.
Implementació inline
def hill_climbing_inline(problema, iteracions=10000):
estat = problema.inicial
fitness = problema.funcio_avaluacio(estat)
for _ in range(iteracions):
millorat_iter = False
for i in range(len(estat)):
for j in range(len(estat)):
if i != j:
estat[i], estat[j] = estat[j], estat[i]
fitness_succ = problema.funcio_avaluacio(estat)
if fitness_succ > fitness:
print(f"{fitness} > {fitness_succ}")
fitness = fitness_succ
millorat_iter = True
else:
estat[i], estat[j] = estat[j], estat[i]
if not millorat_iter:
break
return estat
Problemes
- L’algorisme d’escalada no garanteix trobar el màxim global.
- Pot quedar atrapat en un màxim local.
- Pic més alt que els seus veïns, però no el màxim global.
- Dependrà molt de l’estat inicial.
- Per evitar-ho s’han desenvolupat diverses variants:
- Escalada de primer millor
- Escalada amb reinici aleatori
- Escalada estocàstica
Escalada de primer millor
- L’algorisme d’escalada de primer millor no tria el millor successor.
- En lloc d’això, tria el primer successor que millora l’estat actual.
- Si no hi ha cap successor que millori l’estat actual, l’algorisme s’atura.
- Pot també parar quan s’arribe a un nombre màxim d’iteracions.
- Pot ser molt útil quan el nombre de successors és molt gran.
Implementació
def first_choice_hill_climbing(espai_estats, funcio, max_iteracions):
estat_actual = espai_estats.estat_inicial()
for _ in range(max_iteracions):
successor = espai_estats.genera_successor(estat_actual)
if not successor:
return estat_actual
if funcio(successor) >= funcio(estat_actual):
estat_actual = successor
return estat_actual
Implementació inline
def first_choice_hill_climbing_inline(problema, iteracions=10000):
estat = problema.inicial
fitness = problema.funcio_avaluacio(estat)
for _ in range(iteracions):
millorat_iter = False
for i in range(len(estat)):
if not millorat_iter:
for j in range(len(estat)):
if i != j:
estat[i], estat[j] = estat[j], estat[i]
fitness_succ = problema.funcio_avaluacio(estat)
if fitness_succ > fitness:
print(f"{fitness} > {fitness_succ}")
fitness = fitness_succ
millorat_iter = True
break
else:
estat[i], estat[j] = estat[j], estat[i]
return estat
Escalada amb reinici aleatori
- L’algorisme d’escalada amb reinici aleatori reinicia l’algorisme cada cert temps.
- Això permet escapar dels màxims locals.
- No garanteix trobar el màxim global, però augmenta les possibilitats.
- Aquest algorisme es pot combinar amb altres tècniques de cerca local.
Implementació
def random_restart_hill_climbing(problema, ciutats, iteracions=1000, restarts=10):
millor_estat = None
millor_fitness = float('inf')
for _ in range(restarts):
inicial = TSP.genera_estat_inicial(ciutats)
problema.inicial = inicial
estat = hill_climbing(problema, iteracions=iteracions)
fitness = problema.funcio_avaluacio(estat)
if fitness > millor_fitness:
millor_estat = estat
millor_fitness = fitness
print(f"Millor fitness: {millor_fitness}")
return millor_estat
Execució
solucio = random_restart_hill_climbing(
tsp, ciutats, 1000, 10
)
Millor fitness: 12936.962711620448
Millor fitness: 12887.286272582816
Millor fitness: 12798.50074780205
Algorisme de recuit simulat
- L’algorisme de recuit simulat o simulated annealing es basa en el procés de recuit de la metal·lúrgia.
- Un metall es calenta fins a una temperatura molt alta.
- Després es deixa refredar lentament.
- Això permet que les molècules es reorganicin i minimitzin l’energia.
- Permet acceptar estats que empitjoren l’actual, en certes condicions.
- Incopora l’aleatorietat a l’algorisme d’escalada.
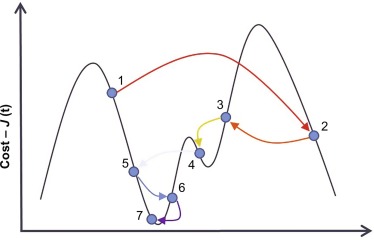
Probabilitat d’acceptació
- La probabilitat d’acceptar un estat empitjorant depèn de la temperatura.
- A mesura que l’algorisme avança, la temperatura disminueix i fa que sigui menys probable acceptar un estat empitjorant.
- La probabilitat d’acceptar un estat empitjorant es calcula amb la següent fórmula:
- $P = e^{-\frac{\Delta E}{T}}$, on $\Delta E$ és la diferència entre el valor de l’estat actual i el valor de l’estat successor.
Propietats
- L’algorisme de recuit simulat pot trobar el màxim global.
- No ho garanteix, però la probabilitat de trobar-lo augmenta amb el nombre d’iteracions.
- Es un dels algorismes de cerca local més utilitzats.
- Usos reals:
- Optimització de xarxes neuronals
- Optimització de circuits electrònics
- Optimització de problemes de planificació
Implementació
def simulated_annealing(espai_estats, funcio, temperatura=100, refredament=0.9):
estat_actual = espai_estats.estat_inicial()
while True:
successors = espai_estats.estats_successors(estat_actual)
successors_ordenats = sorted(successors, key=funcio)
if funcio(successors_ordenats[0]) <= funcio(estat_actual):
estat_actual = successors_ordenats[0]
else:
delta = funcio(successors_ordenats[0]) - funcio(estat_actual)
probabilitat = math.exp(-delta / temperatura)
if random.random() < probabilitat:
estat_actual = successors_ordenats[0]
temperatura *= refredament
if temperatura < 0.00001:
return estat_actual
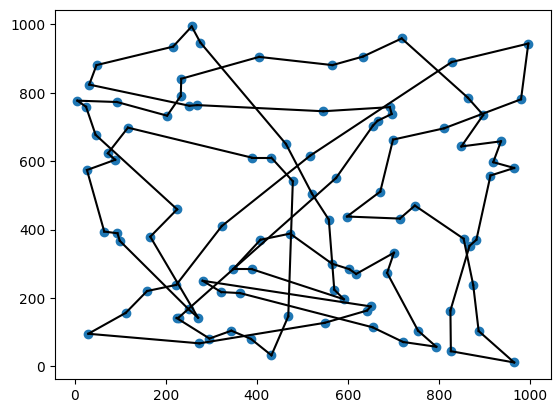
Execució
solucio = hill_climbing(tsp)
plot_tsp(tsp, solucio)
Cost: 50976.93306917217
Cost: 51376.91701004807
...
Cost: 11354.397010378212
Cost: 11350.41254307539
Cost final: 11350.41254307539
Implementació inline (I)
def simulated_annealing(problema, temp=100000, refredament=0.9999, iteracions=10000):
estat = problema.inicial
cost = problema.funcio_avaluacio(estat)
while temp > 0.1:
i = random.randint(1, len(estat) - 1)
j = random.randint(1,len(estat) - 1)
while i == j:
j = random.randint(1, len(estat) - 1)
estat[i], estat[j] = estat[j], estat[i]
cost_nou = problema.funcio_avaluacio(estat)
...
Implementació inline (II)
...
delta = cost_nou - cost
if delta < 0 or math.exp(-delta / temp) > random.uniform(0, 1):
cost = cost_nou
print("Cost: ", cost)
else:
estat[i], estat[j] = estat[j], estat[i]
temp = temp * refredament
print("Cost final: ", cost)
print("Estat final: ", estat)
return estat
Algorismes genètics
Algorismes genètics
- Els algorismes genètics són una tècnica d’optimització inspirada en la evolució biològica.
- Es pot veure com una tècnica de cerca local en paral·lel.
- Cada individu de la població representa un estat.
- Cada gen de l’individu representa una variable de l’estat.
- Els valors dels gens representen els valors de les variables.
- Els individus evolucionen generant nous individus.
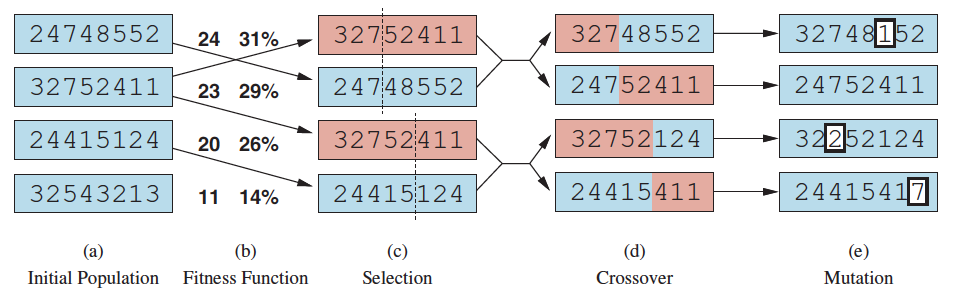
Procediment
- L’algorisme genera una població inicial d’estats.
- Després, genera una nova població a partir de la població actual.
- Aquesta nova població hereta els gens de la població actual.
- A més, muta alguns dels seus gens.
- L’algorisme selecciona els millors de la nova població i descarta la resta.
- L’algorisme s’atura quan s’arriba a un nombre màxim d’iteracions.
Definició del problema
- El primer pas és definir el problema com a un espai d’estats.
- Els estats són individus.
- Els gens són les variables.
- Els valors dels gens són els valors de les variables.
- Per simplificar, representarem els gens com a enters.
- Viatjant de comerç: Seqüència de nombres que representen les ciutats en ordre
- Motxilla: Série de 0/1 que indica si un objecte està o no a la motxilla.
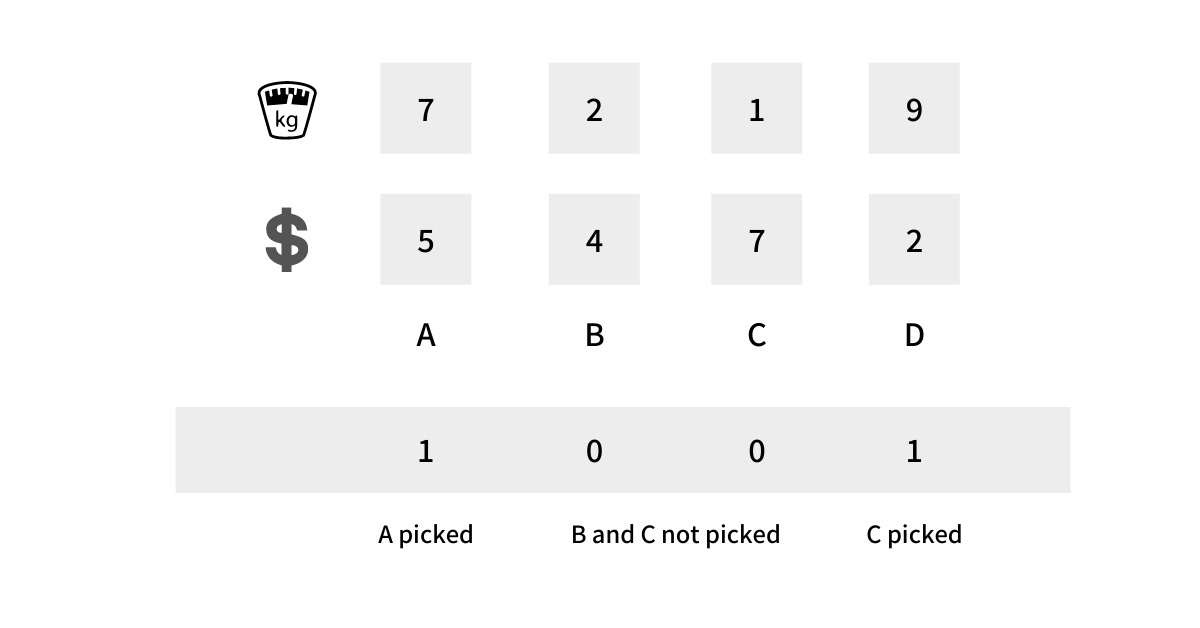
Funció d’avaluació
- Haurem de definir una funció d’avaluació.
- Aquesta funció assigna un valor a cada individu.
- Aquest valor representa la qualitat de l’individu.
- Haurem de ponderar els valors de les variables, segons les característiques de l’inidividu que vullguem potenciar.
Creació de la població inicial
- El tercer pas és crear una població inicial.
- Aquesta població s’ha de crear aleatòriament, dins dels dominis de les variables.
- El nombre d’individus de la població inicial ha de ser suficientment gran i divers, sense fer-lo massa gran.
- Opcionalment, ordenarem els individus segons la seva funció d’avaluació.

Selecció
- Per evolucionar la població s’han de seleccionar els millors individus i serán els que passaran els seus gens a la següent generació.
- Hi ha diverses tècniques de selecció:
- Per torneig: Es trien $k$ individus aleatoris i es selecciona el millor.
- Per ruleta: S’assigna una probabilitat a cada individu, proporcional a la seva funció d’avaluació.
- Per rang: La probabilitat serà proporcional a la seva posició.

Creuament
- El creuament és el procés pel qual es genera un nou individu (en certa probabilitat) a partir de dos individus.
- Els fills hereten els gens dels seus pares, barrejats.
- Hi ha diverses tècniques de creuament:
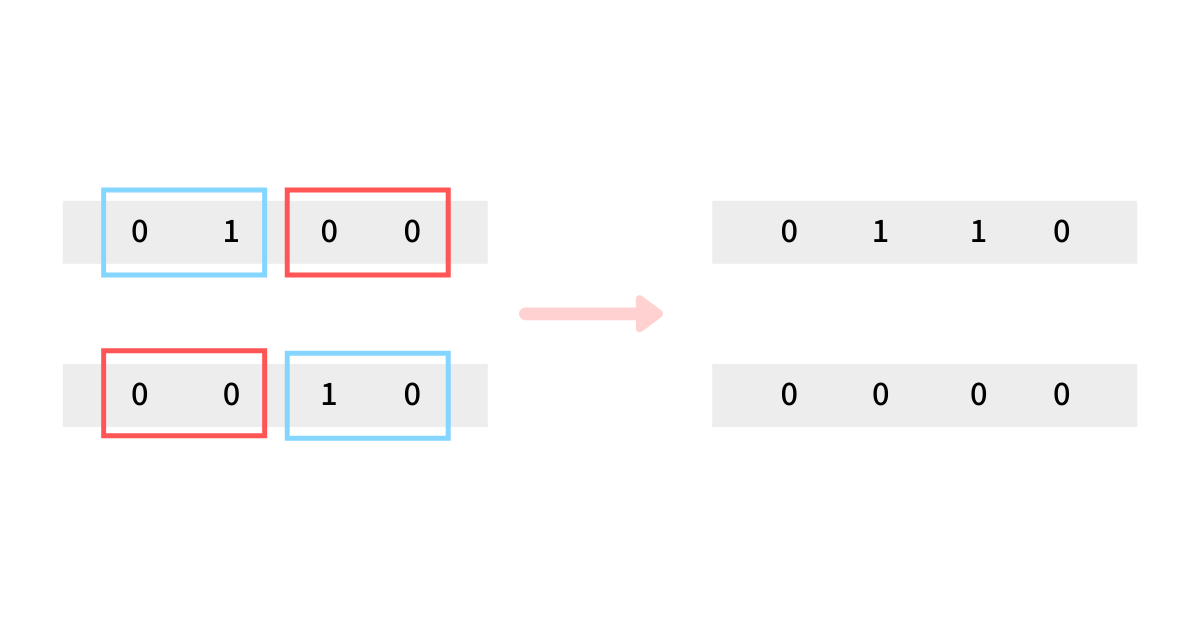
- Creuament per un punt: Es tria un punt aleatori i es barregen els gens a partir d’aquest punt.
- Creuament per dos punts: Es trien dos punts aleatoris i es barregen els gens entre aquests punts.
- Creuament uniforme: Es tria aleatòriament per a cada gen si es hereta del pare o de la mare.
- Altres tècniques: recombinació ordenada, màscara, etc.
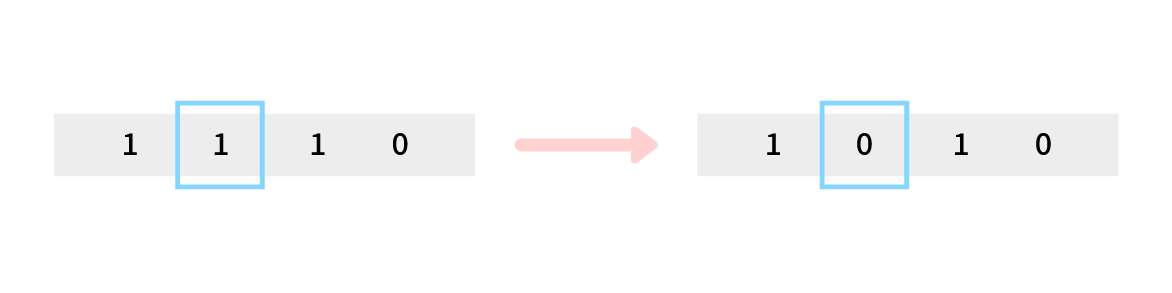
Mutació
- La mutació és el procés pel qual es modifica un gen d’un individu.
- La mutació pot ser necessària per a evitar que l’algorisme quede atrapat en un màxim local.
- Al igual que en la selecció, la mutació s’aplica amb una certa probabilitat (normalment molt baixa).
- Hi ha diverses tècniques de mutació:
- Mutació aleatòria: Es tria un gen aleatori i es modifica.
- Mutació dirigida: Es tria un gen aleatori i es modifica en una direcció concreta.
Implementació (I)
def genetic_algorithm(espai_estats, funcio, num_individus=100, num_iteracions=100):
poblacio = [espai_estats.estat_inicial() for _ in range(num_individus)]
for _ in range(num_iteracions):
seleccionats = sorted(poblacio, key=funcio)[:num_individus]
nova_poblacio = []
for i in range(num_individus):
pare = random.choice(seleccionats)
mare = random.choice(seleccionats)
fill = creuament(pare, mare)
if random.random() < 0.1:
fill = espai_estats.mutacio(fill)
poblacio.append(fill)
poblacio = nova_poblacio
return poblacio[0]
Implementació (II)
def creuament(pare, mare):
punt = random.randint(0, len(pare))
fill = pare[:punt] + mare[punt:]
return fill
def mutacio(individu):
punt = random.randint(0, len(individu))
nou_valor = random.randint(0, 100)
individu[punt] = nou_valor
return individu
Conclusions i problemes
- Els algorismes genètics poden ser difícils de representar.
- Funcionen millor amb els problemes que es poden representar com a un conjunt de variables binàries.
- Solen ser més lents que altres tècniques de cerca local.
- Per molts problemes els operadors de creuament i mutació són difícils de definir.
- La seva capacitat d’entrenar xarxes neuronals els fa molt útils en aquest camp.
Satisfacció de restriccions
Definicions (I)
- Alguns problemes es poden modelar millor com a problemes de satisfacció de restriccions CSP (Constraint Satisfaction Problems)
- Tipus específic de problemes de búsqueda, pero difícils de tractar pel seu tamany.
- Alguns d’aquestos problemes podem solucionar-los amb les técniques de cerca local que ja hem vist.
- El resultat, però, pot no ser una solució optima.
- Per això, s’han desenvolupat tècniques específiques per a aquests problemes.
- Veurem també com podem millorar els resultats de les tècniques de cerca local.
Definicions (II)
- En aquests problemes, l’estat és un conjunt de variables.
- Cada variable té un domini de valors possibles.
- Les restriccions són les relacions entre les variables.
- Els estats que satisfan les restriccions són les solucions.
- Els estats que no satisfan les restriccions són incompatibles.
- Els estats que no són ni solucions ni incompatibles són parcials.
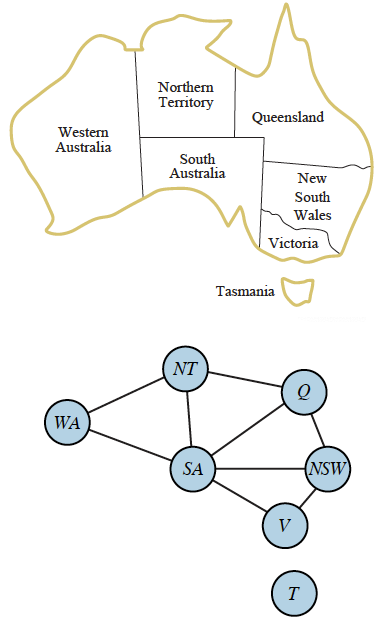
Exemple: Mapa de colors (I)
- Tenim un mapa amb països.
- Volem pintar cada país amb un color.
- No volem que dos països adjacents tinguin el mateix color.
- Les variables són els països.
- Els dominis són els colors.
- Les restriccions són que dos països adjacents no poden tenir el mateix color.
- Els estats són les combinacions de colors per a cada país.
- Les solucions són les combinacions de colors que satisfan les restriccions.
Exemple: Mapa de colors (II)
- Els algorismes que veurem es basen en representar les restriccions com a grafs.
- Grafs de restriccions o constraint graphs.
- Els nodes del graf són les variables.
- Les arestes del graf són les restriccions.
- Les solucions són els nodes del graf que no tenen cap aresta que els connecte.
Força bruta
- Una forma de solucionar aquest problema és provar totes les combinacions.
- Aquesta solució és poc eficient.
- El nombre de combinacions és molt gran.
- Si tenim 10 països i 4 colors, el nombre de combinacions és de $4^{10} = 1.048.576$.
- Aquesta solució no és tractable.
- El nombre de combinacions creix exponencialment amb el nombre de variables.
- Aquest problema és NP-complet.
Búsqueda en tornada (backtracking)
![]()
Descripció
- L’algorisme de búsqueda en tornada o backtracking és un algorisme de búsqueda no informada.
- Partint d’una serie de variables
- L’algorisme assigna un valor a una variable.
- Després, comprova si aquesta assignació viola alguna restricció.
- Si no la viola, assigna un valor a la següent variable.
- Si la viola, desfà l’assignació i cambia el valor de la variable anterior.
- L’algorisme s’atura quan ha assignat un valor a totes les variables.
Implementació
def backtrack():
return _backtrack([], 0)
def _backtrack(estat, posicio):
if posicio==len_solucio and es_solucio(estat):
return estat
for i in range(len_solucio):
estat.append(i)
if es_valid(estat) == 0:
solu = _backtrack(estat, posicio + 1)
if solu is not None:
return solu
estat.pop()
return None
Problemes
- L’algorisme de búsqueda en tornada garanteix trobar la solució.
- El seu cost és molt alt.
- El nombre d’estats que cal explorar és molt gran.
- Serà menor que el nombre d’estats de l’espai d’estats, però pot ser no molt menor.
- Veurem algunes de les optimitzacions que podem aplicar
Ordenació de variables
- L’ordre de selecció les variables afecta al nombre d’estats que cal explorar.
- Algunes estrategies d’ordenació:
- Variable més restringida (MRV): La variable amb menys valors possibles.
- Pot detectar incompatibilitats abans.
- Variable menys restringida (LRV): La variable amb més valors possibles.
- Pot donar més flexibilitat al principi.
- Grau (degree): La variable amb més restriccions.
- Pot resoldre incompatibilitats crítiques abans.
- Variable més restringida (MRV): La variable amb menys valors possibles.
Ordenació de valors
- L’ordre de selecció els valors també determina el nombre d’estats que cal explorar.
- Algunes estrategies d’ordenació:
- Menys restriccions (LCV): El valor que deixa més opcions a les variables restants.
- Intenta minimitzar els conflictes futurs.
- Més restriccions (MCV): El valor que deixa menys opcions a les variables restants.
- Pot permetre accelerar cap a solucions viables.
- Aleatori: El valor es tria aleatòriament.
- Pot donar més flexibilitat al principi.
- Menys restriccions (LCV): El valor que deixa més opcions a les variables restants.
Implementació de les optimitzacions (I)
def backtrack():
estat = [-1]*len_solucio
variables = list(range(len_solucio))
return _backtrack(estat, variables)
Implementació de les optimitzacions (II)
def _backtrack(estat, variables):
if es_solucio(estat):
return estat
var = selecciona_variable(variables)
for i in ordena_valors(var):
estat[var] = i
if es_valid(estat) == 0:
variables.remove(var)
solu = _backtrack(estat, variables)
if solu is not None:
return solu
variables.append(var)
estat[var] = -1
Algorisme de mínims conflictes
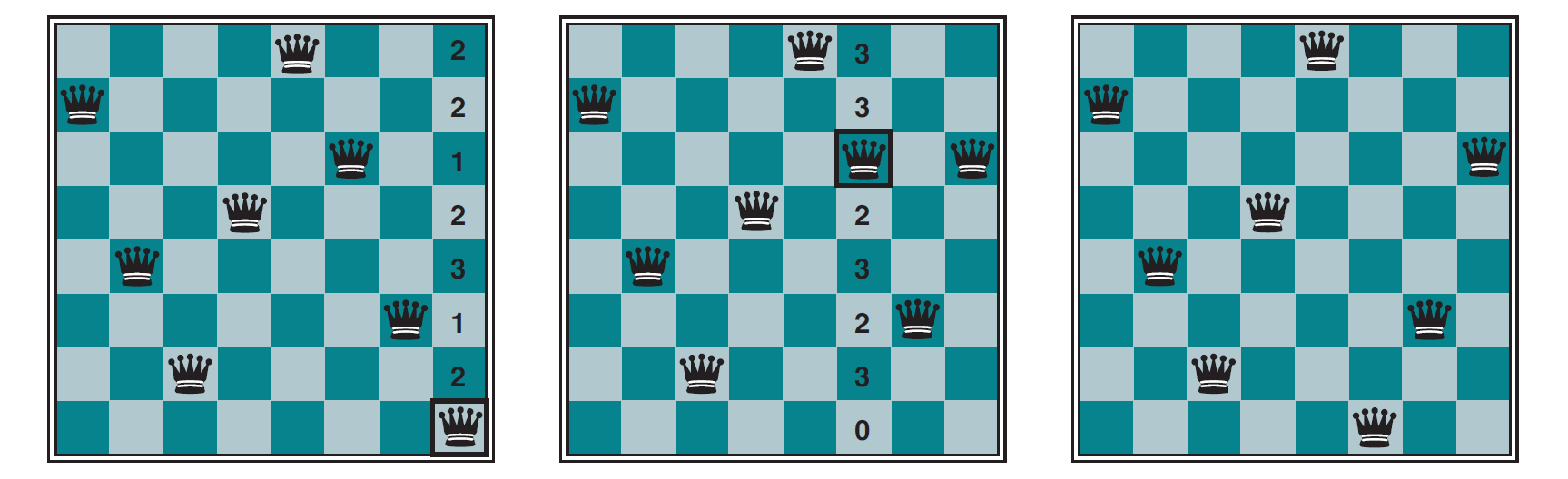
Descripció
- L’algorisme de mínims conflictes o minimum conflicts és un algorisme de búsqueda local específic per a CSP.
- Tria una variable aleatoriament i li assigna un valor que minimitzi el nombre de restriccions violades.
- Repeteix aquest procés fins que totes les restriccions estiguin satisfetes
- o s’arriba a un nombre màxim d’iteracions.
- Molt eficient si l’assignació inicial és bona.
- Pot ser recomanable utilitzar un algorisme voraç per a trobar una bona assignació inicial.
Exemple: N Reines (I)
- Tenim un tauler d’escacs de N x N.
- Volem col·locar N reines en el tauler.
- No volem que cap reina pugui matar a una altra.
- Les variables són les files.
- Els dominis són les columnes.
- Les restriccions són que no hi pugui haver dues reines en posició d’atac.
Exemple: N Reines (II)
- Per al problema de les $N$ reines i una $N = 8$, tindrem fins a $8^8 = 16.777.216$ estats.
- L’algorisme de mínims conflictes no genera estats successors, modifica l’estat actual.
- No necessitem una estructura de dades que representi l’espai d’estats.
- Aixó fa qué l’algorisme de mínims conflictes siga més eficient que la búsqueda en tornada.
- L’algorisme de mínims conflictes no garanteix trobar la solució però en la gran majoria dels casos la troba.
Exemple: N Reines (III) - Implementació
def minims_conflictes(espai_estats, funcio, max_iteracions):
inicial = espai_estats.estat_inicial()
actual = inicial
for _ in range(max_iteracions):
if espai_estats.es_solucio(actual):
return actual
i = random.randint(0, len(actual.tauler) - 1)
act_conflicts = funcio(actual)
for j in range(len(actual.tauler)):
if j != i:
actual[i], actual[j] = actual[j], actual[i]
new_conflicts = funcio(actual)
if new_conflicts <= act_conflicts:
act_conflicts = new_conflicts
else:
actual[i], actual[j] = actual[j], actual[i]
return actual