Aquesta pàgina es genera automàticament a partir de la presentació MARP
9-robotica.md. No l’edites directament.
9. Robòtica
Models d’intel·ligència artificial

Introducció
- La robòtica és una branca de la tecnologia que es dedica al disseny i construcció de robots.
- Els robots permeten als nostres models d’intel·ligència artificial interactuar amb el món real.
- La robòtica és una disciplina multidisciplinària que combina coneixements d’enginyeria, informàtica, matemàtiques, física, biologia, etc.
Robots
- Un robot és un dispositiu programable que realitza tasques manipulant el seu entorn.
- Per fer-ho, els robots utilitzen actuadors per interactuar amb el món real.
- Els canvis podem ser físics (moure objectes) o digitals (enviar informació).

Sensors
- Els sensors són dispositius que permeten als robots percebre el seu entorn.
- Hi ha molts tipus de sensors. Els grups més importants son:
- Mesurar l’estat de l’entorn: càmeres, radars, ultrasons, etc.
- Mesurar l’estat del robot: acceleròmetres, giroscopis, encoders, etc.
Operacions
- Per maximizar la seva eficiència, els robots han de ser capaços de prendre decisions.
- Les decisions poden ser simples (moure’s cap a l’objectiu) o complexes (conduir un cotxe), sempre en l’objectiu de realitzar una tasca.
- Ho podem reduir a un problema d’optimització: aplicar les forces adequades per maximitzar l’objectiu.
- Problema: com fer-ho de manera eficient?
Entorn
- En els problemes d’optimització que hem vist fins ara l’entorn era virtual, observable i determinista.
- En el món real, l’entorn és no observable, no determinista i no estàtic.
- Aixó fa que els problemes de robòtica siguin molt més complicats que els problemes d’optimització tradicionals.
- També es dificulta l’aprenentatge: el temps no es pot retrocedir per provar diferents accions ni es pot accelerar
Intel·ligència artificial
- Tot el discutit fins ara ens porta a que els robots impliquen molts conceptes dels vists durant el curs.
- Per alguns dels conceptes vistos trobarem en la robòtica una aplicació pràctica i real Per exemple, els robots autònoms utilitzen xarxes neuronals per processar la informació dels sensors i prendre decisions.
- Altres conceptes es veuran ampliats: per exemple, els algoritmes d’optimització han de ser adaptats per funcionar en entorns no deterministes.
Hardware de robòtica
- Fins ara hem suposat que la forma de interactuar amb el món real era a través de la pantalla.
- Amb la robòtica, aquesta interacció es fa a través de sensors i actuadors.
- No podem solament programar el comportament del robot, sinó que també hem de dissenyar el hardware que ens permetrà interactuar amb el món real.
- La selecció dels sensors i actuadors determinarà el seu funcionament en les tasques que haurà de realitzar.
Tipus de robots segons el seu hardware
- Robots antropomòrfics: robots que imiten la forma humana. També coneguts com a robots humanoides. Els més populars pero molt complexos i costosos.
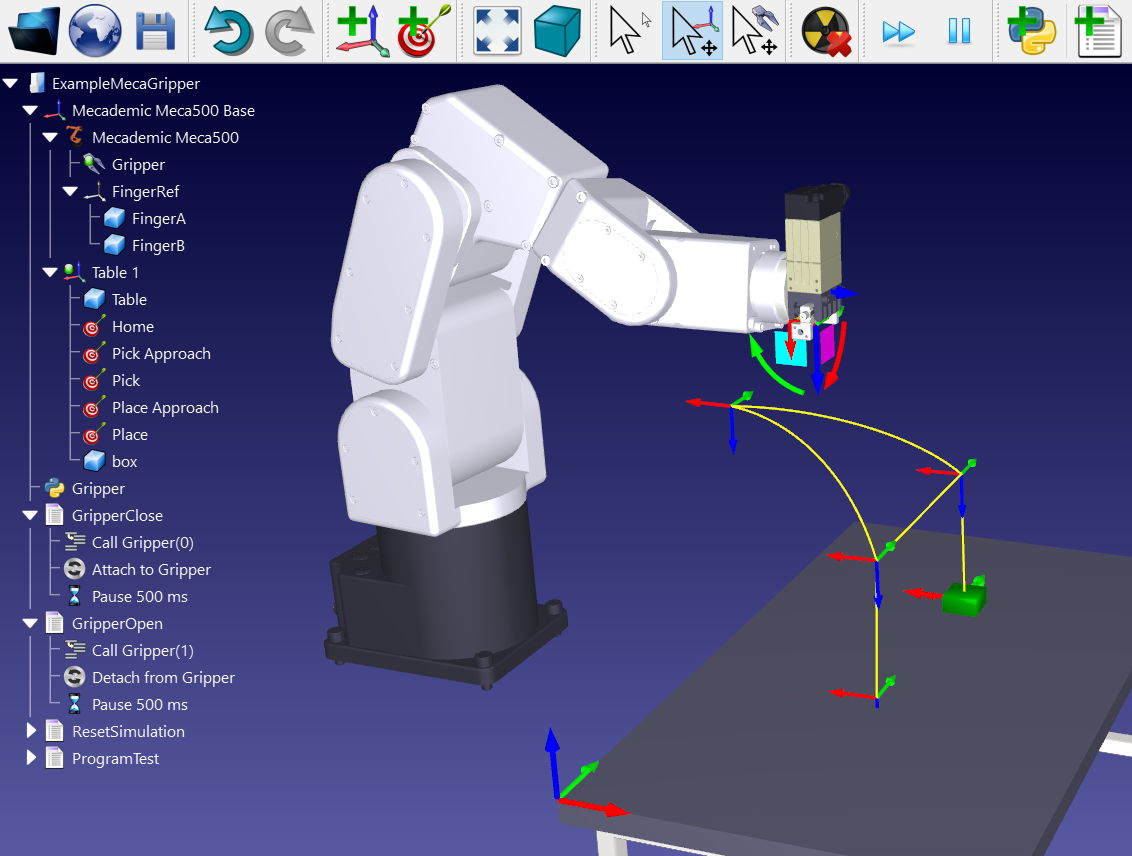
- Braços robòtics: robots que poden moure objectes. També coneguts com a robots manipuladors. Són els més comuns, especialment en la indústria.
- Robots mòbils: robots que poden moure’s pel seu entorn. Poden ser terrestres, aquàtics o aeris. Són els més comuns en la robòtica autònoma.


Sensors i actuadors
Tipus de sensors
- Actius: emeten una senyal i mesuren la resposta. Es solen utilitzar per mesurar distàncies.
- Necessiten una font d’energia. Més precisos però més cars i complexos.
- Radars, ultrasons.
- Passius: mesuren la radiació que reben. Es solen utilitzar per mesurar la llum o el so.
- No necessiten una font d’energia. Econòmics i fàcils d’utilitzar.
- Càmeres, micròfons.
Sensors de distància
Permeten als robots mesurar la distància a objectes.
- Ultrasons: emeten ones sonores i mesuren el temps que triguen a rebre l’eco. Polivalents i econòmics.
- Radars: emeten ones electromagnètiques i mesuren el temps que triguen a rebre el reflexe. Molt utilitzats en robots aèris.
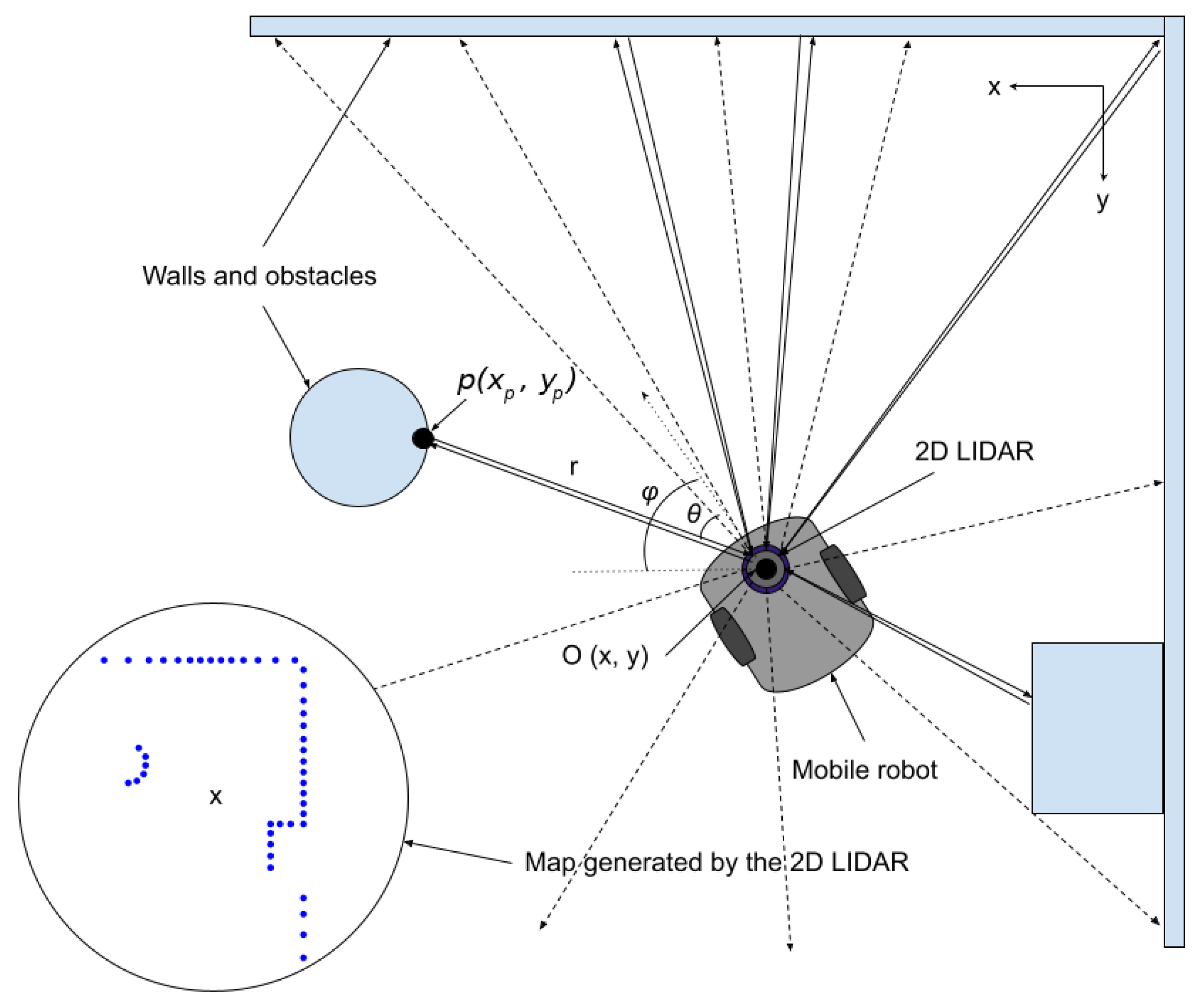
- LIDAR: utilitzen làser per mesurar la distància a objectes amb una gran precisió. Molt utilitzats en vehicles autònoms terrestres.
LIDAR
Sensors de localització
Permeten als robots saber on es troben en el seu entorn.
- GPS: permet als robots saber la seva posició en un mapa. L’equivalent Rus és el GLONASS i el xinès el Beidou. Solament funciona a l’aire lliure.
- Beacons: emeten una senyal que permet als robots saber la seva posició en un espai conegut. Molt utilitzats en robòtica indoor.
- Wi-Fi: La força de la senyal Wi-Fi permet substituir els beacons en entorns amb Wi-Fi.
Propiocepció
Es refereix a la capacitat dels robots de saber la seva posició i orientació en l’espai.
- Sensors inercials: acceleròmetres i giroscopis que permeten als robots saber la seva orientació.
- Encoders: permeten als robots saber la seva posició en un eix.
- Odometria: permet als robots saber la seva posició en un pla. Utilitza encoders i giroscopis.
- SLAM: permet als robots saber la seva posició en un entorn desconegut. Utilitza càmeres i LIDAR.
Altres
- Sensors de temperatura, humitat, pressió, etc.: permeten als robots mesurar variables ambientals.
- Sensors de força: permeten als robots mesurar la força que fan servir.
- Sensors de color: permeten als robots mesurar el color dels objectes.
- Sensors de llum: permeten als robots mesurar la llum ambiental.
- Sensors de so: permeten als robots mesurar el so ambiental.

Actuadors
- Els actuadors són els components del robot que permeten moure’s pel seu entorn. Els més comuns són:
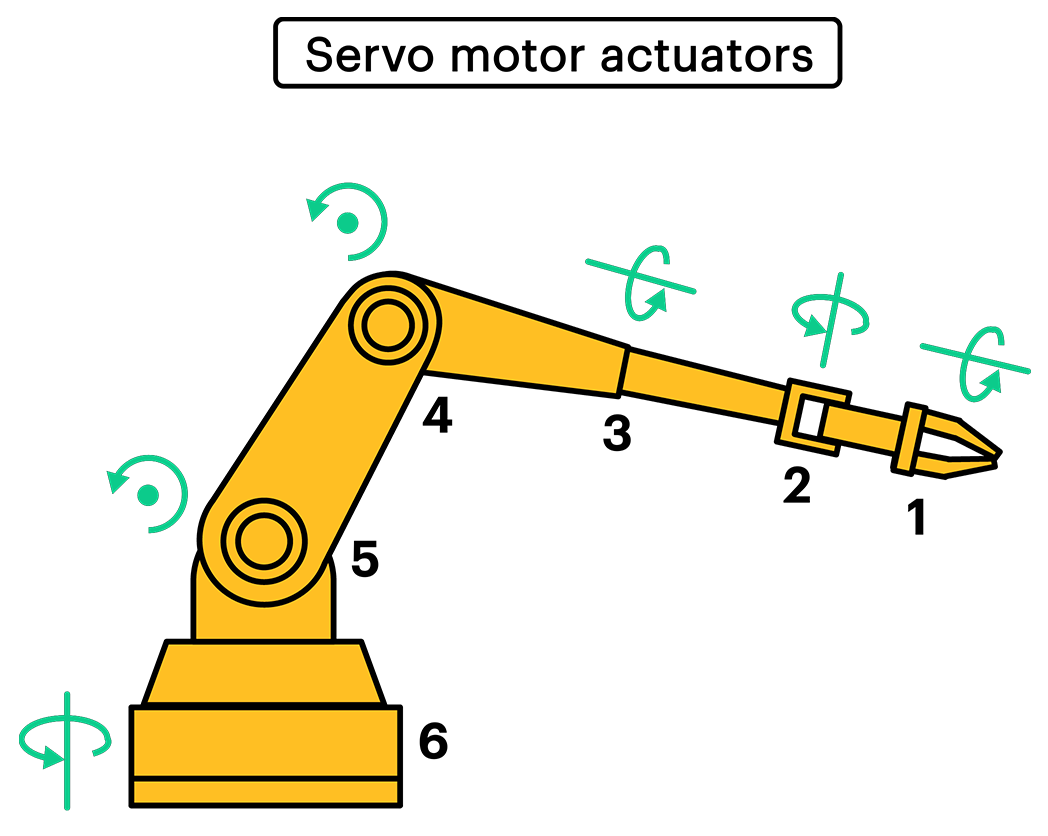
- Servomotors: permeten moure’s en un eix. Molt utilitzats en robots manipuladors.
- Motors DC: permeten moure’s en un eix. Molt utilitzats en robots mòbils.
- Motors pas a pas: permeten moure’s en un eix amb una gran precisió.
- Hidràulics: permeten moure’s amb una gran força. Molt utilitzats en robots industrials.
Programació de robots
Programació de robots
- La programació de robots és molt més complexa que la programació de software tradicional.
- No coneixem l’estat de l’entorn, per tant, hem de plantejar les tasques del robot com un problema d’optimització, on hem de trobar la millor seqüència d’accions per aconseguir un objectiu.
- Veurem com aplicar els conceptes de programació i d’intel·ligència artificial vistos fins ara a la robòtica.
Percepció
- La percepció és la capacitat del robot de percebre el seu entorn.
- Convertir les dades dels sensors en una representació interna.
- És un problema complex, ja que els sensors poden ser molt ruidosos i inexactes.
- Necessitem filtrar i processar les dades dels sensors per obtenir una representació fiable de l’entorn.
- Haurem de construïr un model complet, fàcil d’actualitzar i eficient de l’entorn.
Localització
- Localització: determinar la posició dels objectes (incloent el robot) en l’entorn.
- Inclús en entorns coneguts, la localització és un problema complex, ja que els sensors poden ser molt inexactes.
- Partint d’una posició inicial i sabent les acccions que ha fet el robot la posició final serà una distribució de probabilitat.
- Monte Carlo Localization (MCL) vs Extended Kalman Filter (KF): MCL és més precís però més lent. EKF és més ràpid però menys precís.
- Ambdós es basen en la teoria de la probabilitat.
Mapatge
- Mapatge: construir un mapa de l’entorn a partir de les dades dels sensors.
- Problema complex: difícil localitzar-se sense un mapa, però difícil construir un mapa sense saber on estàs.
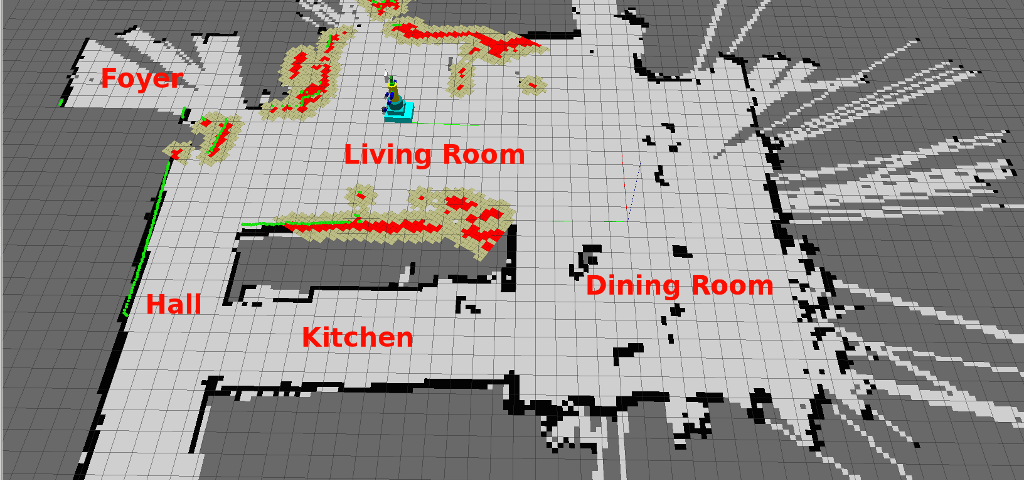
- Simultaneous Localization and Mapping (SLAM): resoldre simultàniament el problema de la localització i el mapatge.
- SLAM visual: utilitza càmeres per localitzar-se i construir un mapa.
- SLAM LIDAR: utilitza LIDAR per localitzar-se i construir un mapa.
Altres tipus de percepció
- Hi ha altres tipus de percepció que són importants en robòtica com poden ser els de temperatura, llum, olor, etc.
- La percepció de variables ambientals és important en moltes tasques robòtiques.
- Per exemple, un robot que ha de netejar una habitació necessita percebre la brutícia.
- Aquest tipus de percepció es pot fer amb sensors especialitzats.
- Podem aplicar un enfocament similar al de la percepció visual o un enfocament reactiu.
Comportament reactiu
- Els robots reactius són robots que prenen decisions basades en les dades dels sensors en temps real.
- Aquesta és una estratègia senzilla però efectiva per a moltes tasques robòtiques.
- Els robots reactius són molt ràpids i eficients, però no sempre poden resoldre tasques complexes.
- Podem combinar els robots reactius amb altres estratègies per resoldre tasques més complexes.
- L’exemple més senzill és el dels vehicles de Braitenberg.
Vehicles de Braitenberg
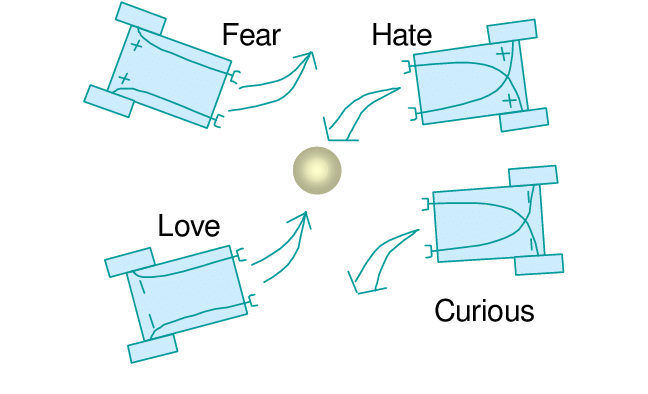
- Valentino Braitenberg va proposar un model senzill de vehicles autònoms que mostren comportaments sorprenents.
- Els vehicles de Braitenberg són vehicles amb sensors i actuadors que segueixen unes regles senzilles. Normalment interconecten els sensors amb els actuadors directament.
- Els vehicles mostren comportaments complexos com seguir la llum, evitar obstacles, etc.
- Son representatius de la robòtica BEAM (Biology, Electronics, Aesthetics, Mechanics).
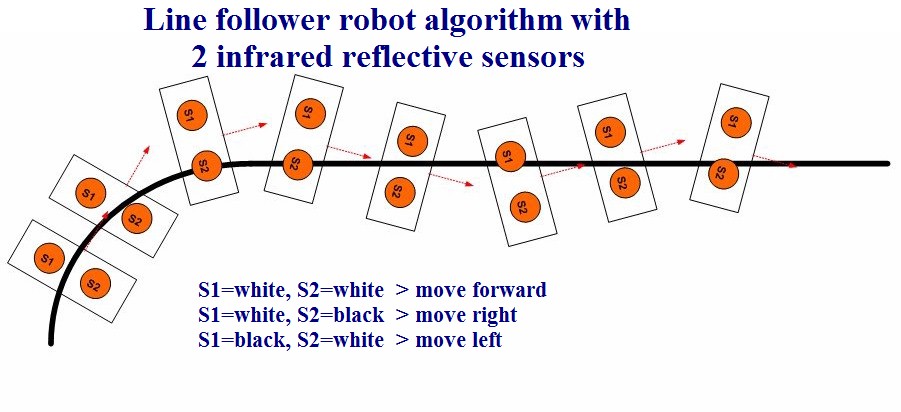
Seguiment de línies
- El seguiment de línies és una tasca comuna en robòtica mòbil.
- Consisteix en seguir una línia en el terra utilitzant sensors d’infrarojos o càmeres.
- Els robots que segueixen línies utilitzen un algoritme senzill per determinar la direcció en la que han de moure’s.
- En la forma més senzilla, el robot gira cap a la línia quan la veu i rectifica la seva trajectòria quan la perd.
Màquines d’estats finits
-
Les màquines d’estats finits són una eina molt útil per programar robots.
- Un pàs més enllà dels robots reactius en complexitat i flexibilitat.
- Model matemàtic** que descriu el comportament d’un **sistema com una sèrie d’estats i transicions**, on cada estat representa una situació en la que es pot trobar
- Robots reactius: les decisions es prenen segons l’estat actual
- FSM: En funció de les entrades actuals i de l’estat en el que es troba el robot.
Exemple de màquina d’estats finits (I)
-
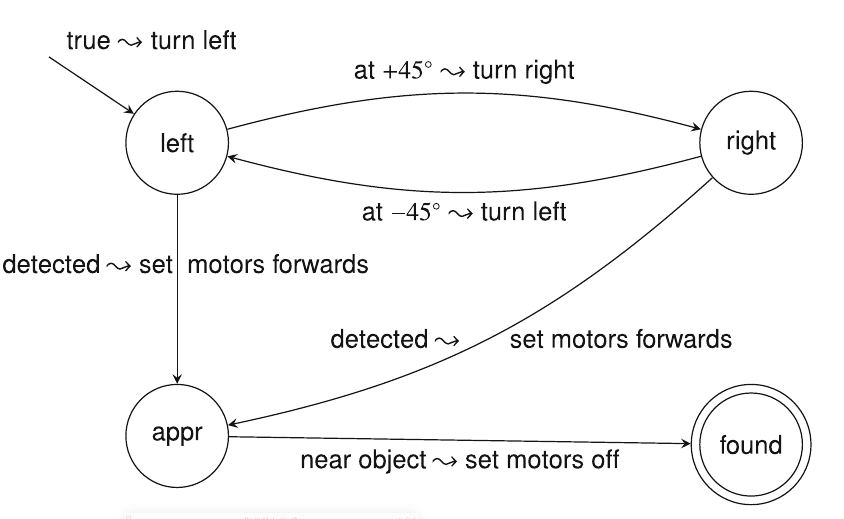
Un exemple senzill del que podem fer amb una màquina d’estats finits és el de buscar un objectiu.
-
En aquest cas, tenim quatre estats:
- Esquerra: el robot gira a l’esquerra buscant l’objectiu.
- Dreta: el robot gira a la dreta buscant l’objectiu.
- Endavant: el robot va endavant.
- Objectiu: el robot ha trobat l’objectiu i s’atura.
Exemple de màquina d’estats finits (II)
- Les transicions entre estats es fan en funció de les dades dels sensors:
- Si el robot passa de +45º passa a l’estat Dreta.
- Si el robot passa de -45º passa a l’estat Esquerra.
- Si el robot passa detecta l’objectiu passa a l’estat Endavant i comença a moure’s cap a l’objectiu.
- Quan el robot arriba a l’objectiu passa a l’estat Objectiu i s’atura.
Estat de l’algorisme
- Quasi tots els algorismes de robòtica són estatals.
- Necessiten guardar alguna informació de l’estat actual del robot.
- Aquesta informació pot ser molt senzilla (com en el cas de la màquina d’estats finits) o molt complexa.
- Els FSM són una eina molt útil d’introdïr l’estat en els algorismes de robòtica.
- Per algorismes més complexos necessitarem eines més avançades.
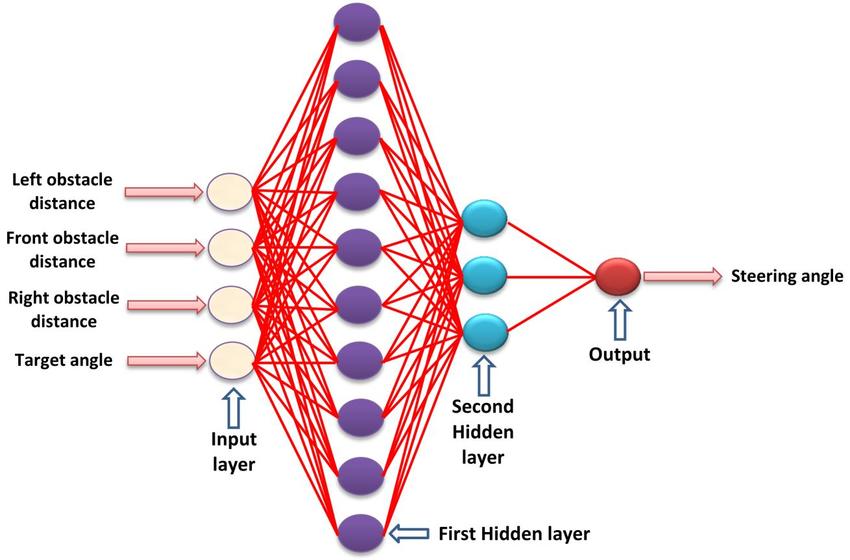
Xarxes neuronals
- Les xarxes neuronals són una eina molt potent per resoldre problemes de robòtica.
- Com les xarxes neuronals poden aproximar qualsevol funció, podem utilitzar-les per controlar un robot.
- Les XN Feedforward són les més comunes en robòtica, ja que són senzilles i eficients.
- Serien equivalents a un sistema reactiu
- Les XN Recurrents són més complexes però més potents.
- Serien equivalents a un sistema basat en FSM.
Aprenentatge (I)
- Per entrenar les xarxes neuronals podem utilitzar tècniques d’aprenentatge supervisat o no supervisat.
- Supervisat: donem un conjunt de dades d’entrada i sortida i la xarxa apren a partir d’aquestes dades.
- Replegarem dades de sensors i actuadors per entrenar la xarxa.
- Si volem que el robot segueixi una línia, recollirem dades de sensors de línia i actuadors de moviment.
- Una vegada entrenada la xarxa, el robot serà capaç de seguir la línia sense necessitat de programar-lo.
- Supervisat: donem un conjunt de dades d’entrada i sortida i la xarxa apren a partir d’aquestes dades.
Aprenentatge (II)
- Aprenentatge per reforç: les xarxes aprenen a partir de la interacció amb l’entorn.
- Definirem un premi per a les accions desitjades i un càstig per a les accions no desitjades. El robot provarà diferents accions i aprendrà quines són les millors a partir dels premis rebuts.
- Neuroevolució: utilitzar algoritmes evolutius per evolucionar les xarxes neuronals.
- Crearem una població de xarxes neuronals i les farem competir entre elles. Les xarxes més eficients es reproduiran i evolucionaran.

Conclusions
- La robòtica és una disciplina multidisciplinària que combina coneixements d’enginyeria, informàtica, matemàtiques, física, biologia, etc.
- Els robots permeten als nostres models d’intel·ligència artificial interactuar amb el món real.
- La robòtica és una eina molt potent per resoldre problemes complexos en entorns no deterministes.
- Hem vist com aplicar els conceptes de programació i d’intel·ligència artificial vistos fins ara a la robòtica.