Aquesta pàgina es genera automàticament a partir de la presentació MARP
8-visio_artificial.md. No l’edites directament.
8. Visió artificial
Models d’intel·ligència artificial
Introducció
- La visió artificial és una de les àrees més antigues de la intel·ligència artificial.
- Els primers sistemes de visió artificial van ser desenvolupats a la dècada dels 60.
- Els sistemes de visió artificial són capaços d’analitzar imatges i vídeos per tal d’extreure’n informació.
- Veurem quins són els conceptes bàsics de la visió artificial i com s’apliquen en la pràctica.
Visió
- Procés de percepció, on el sistema visual és capaç de construir una representació (imatge) a partir de la informació captada per la retina.
- Aquest procés pot ser actiu (quan l’observador mou els ulls) o passiu (quan l’observador no mou els ulls).
- La visió artificial pura és un procés passiu, molts conceptes, però, com la localització o la reconstrucció 3D requereixen un procés actiu.
Enfocaments
- Hi ha dos enfocaments principals per a la visió artificial:
- Extracció de característiques:
- S’apliquen una serie de transformacions a la imatge per tal d’extreure característiques rellevants (vores, textura, fluix òptic, segments, entre d’altres).
- Basat en models:
- S’utilitzen models matemàtics (geomètrics o estadístics) per tal de representar la imatge.
- Extracció de característiques:
- En la pràctica, sovint es combinen ambdós enfocaments.
El color (I)
- Propietat de la llum que depèn de la seva longitud d’ona.
- Els humans el percebem el a partir d’unes cèl·lules receptores de la retina: els cons.
- Hi ha tres tipus de cons:
- L (longitud d’ona llarga)
- M (longitud d’ona mitjana)
- S (longitud d’ona curta)
- Cada tipus de cons és sensible a un rang de longituds d’ona i, per tant, a un rang de colors.
- Hi ha tres tipus de cons:
El color (II)
- Principi de tricromia: qualsevol color es pot representar com una combinació de tres colors primaris.
- Colors primaris
- Aquells que no es poden descompondre en altres colors.
- blau, verd i vermell.
- Espais de color: RGB, HSV, YUV, …
- El més utilitzat en visió artificial és el RGB (Red, Green, Blue).
Característiques de les imatges
Definició
- En una imatge hi ha molta informació que no és rellevant.
- Per les tasques de visió artificial es solen utilitzar característiques de les imatges.
- Les característiques són aquelles parts de la imatge que són rellevants per a la tasca que es vol realitzar.
- Ens centrarem en quatre característiques de les imatges quasi sempre rellevants.
- Vores, textura, fluix òptic i segmentació.
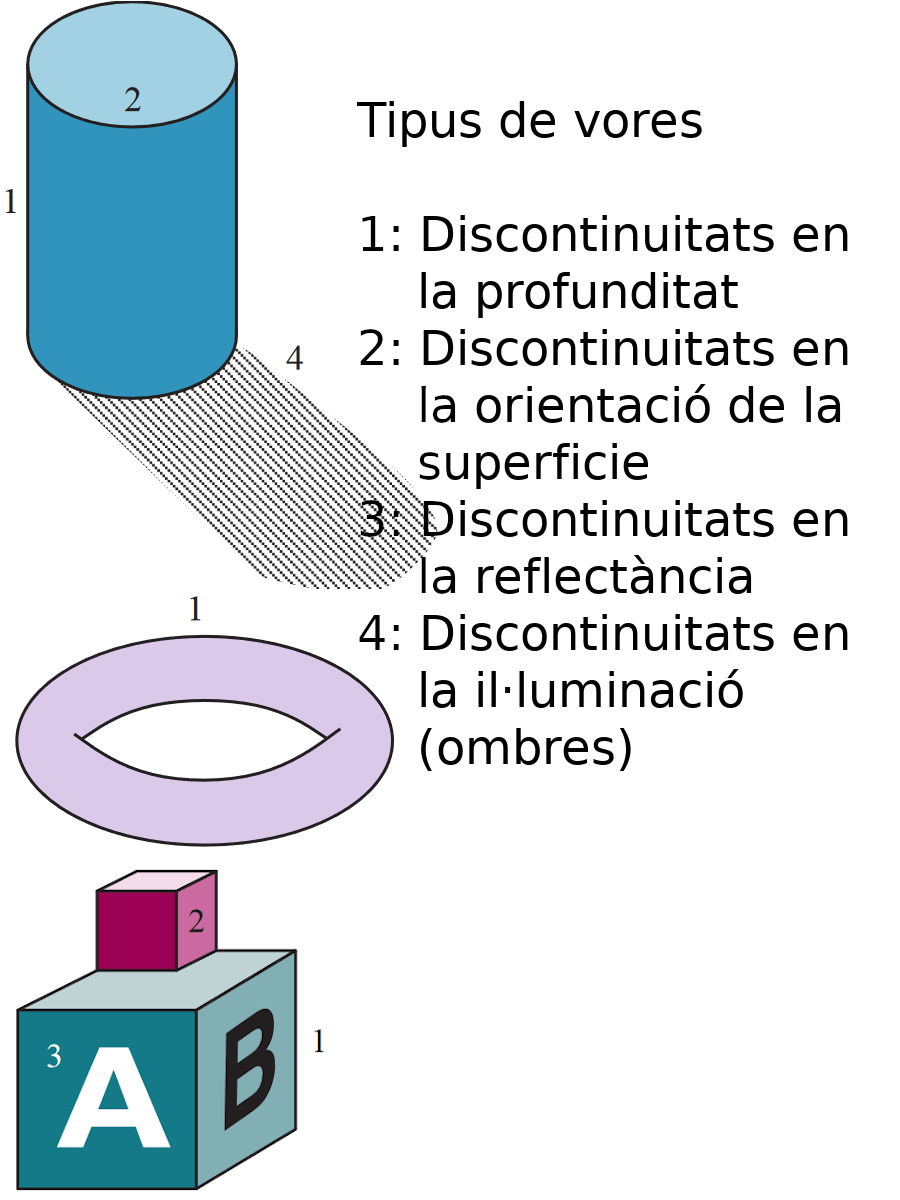
Vores
- Línees que separen regions de diferent intensitat.
- Permeten identificar objectes.
- Simplifiquen la imatge i permeten reduir la quantitat d’informació.
- Passem d’una imatge molt gran a una matriu de vores
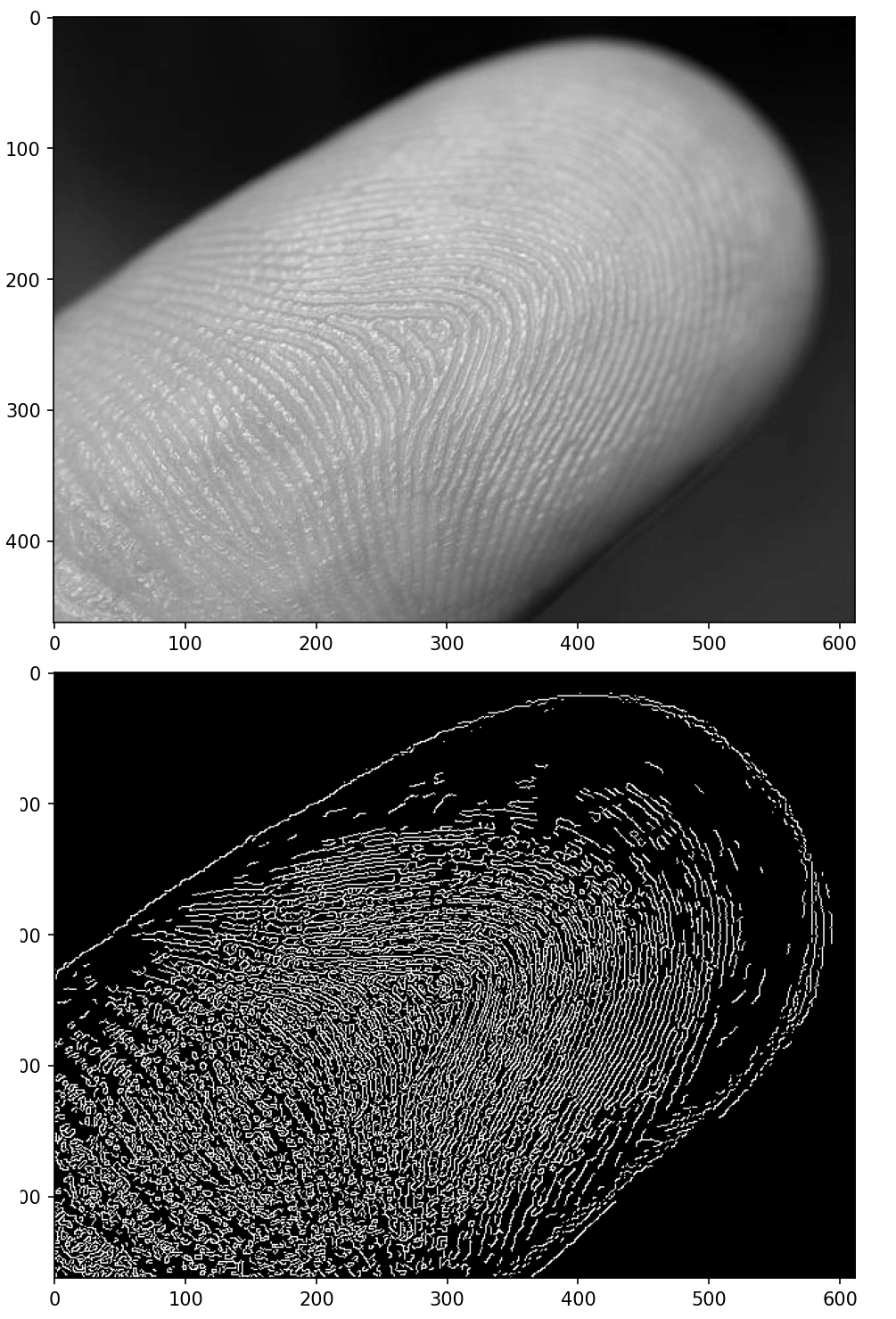
Detecció de vores
- Tasca de visió artificial que consisteix en detectar les vores d’una imatge.
- Hi ha molts algoritmes per detectar vores, però el més utilitzat és l’algoritme de Canny, per John F. Canny, que el va publicar el 1986.
- Objectius:
- Bona detecció: detectar totes les vores.
- Bona localització: les vores han de ser el més pròximes possible a les vores reals.
- Minimitzar les respostes falses
Algoritme de Canny
- Consisteix en quatre passos principals:
- Es redueix el soroll: filtre de Gauss.
- Calcula el gradient de la imatge: filtre de Sobel.
- Es detecten les vores: mètode de supressió de no-màxims.
- Es decideixen quines vores són vàlides: mètode de la histèresi.
Textura
- En visió artificial entenem com a textura un patró de píxels que es observable en una imatge.
- Ex: Finestres en un edifici, taques en una vaca, etc.
- Ajuden, al igual que les vores, a identificar objectes.
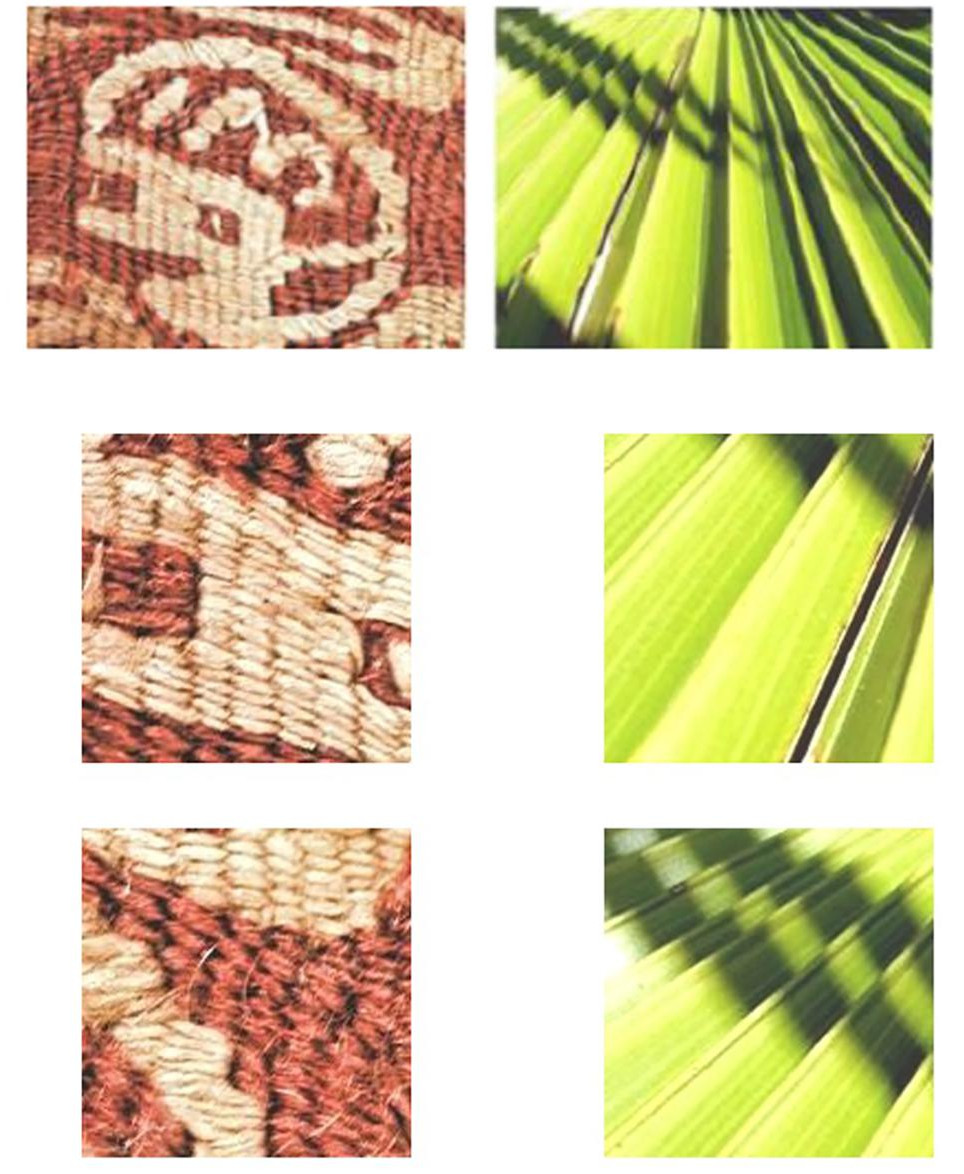
Característiques de la textura
-
La textura pot ser més o menys regular, per lo que es freqüent utilitzar un model de tesel·les per descriure-la. Vejam algunes característiques:
- Tesel·la: patró que es repeteix en una imatge.
- Tesel·lació: procés de cobrir una superfície amb tesel·les.
- Tipus:
- Regulars: es repeteixen sempre de la mateixa manera.
- Irregulars: no hi ha un patró clar de repetició.
- Escala: la textura pot ser més o menys gran.
Utilitats de la textura
- Identificació: permet identificar objectes. Ex: un cavall té una textura diferent a la d’una zebra.
- Correspondència: permet trobar zones corresponents en diferents imatges. Important en la reconstrucció 3D.
- Segmentació: permet separar la imatge en diferents regions.
- Reconstrucció: permet reconstruir la imatge a partir de les tesel·les.
- Classificació: permet classificar objectes.
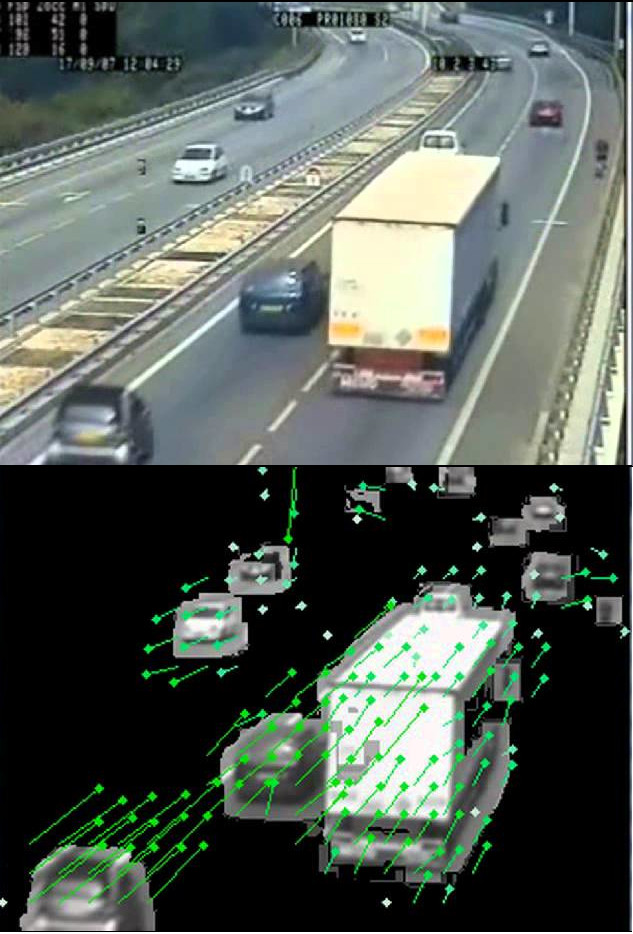
Fluix òptic
- El fluix òptic és la velocitat aparent amb la que es mouen els objectes entre dues imatges.
- Els algoritmes de visió artificial són capaços de calcular el fluix òptic a partir de diferents imatges.
- Important per moltes tasques: reconstrucció 3D, la compensació de moviment, compressió…
Segments
- Anomenen segments a les regions de la imatge que tenen alguna propietat comuna (color, textura, forma, etc.).
- Per definit els segments hi ha dós enfocaments principals:
- Basat en límits: es busquen els límits de les regions. Es pot entendre com un problema de classificació on cada pixel pertany o no a un segment i es soluciona amb tècniques de machine learning i models preentrenats.
- Basat en regions: s’agrupen els pixels en regions segons alguna propietat comuna. Es pot entendre com un problema de clustering i s’utilitzen tècniques com k-means.
Tasques de visió artificial

Tasques
- Les tasques de visió artificial són aquelles que es poden realitzar a partir d’imatges.
- Hi ha moltes tasques de visió artificial, però totes tenen en comú que es basen en l’anàlisi de les imatges.
- Veurem algunes de les més importants:
- Processament d’imatges
- Classificació d’imatges
- Reconeixement d’objectes
- Segmentació
Processament d’imatges
- El processament d’imatges és el conjunt de tècniques que s’apliquen a les imatges per tal de millorar-ne la qualitat o per tal d’extreure’n informació.
- Històricament, el processament d’imatges era la única forma de obtindre resultats en visió artificial, amb l’aparició de les xarxes neuronals, però, aquesta tasca ha perdut importància.
- Tot i això, segueix sent una tasca important en visió artificial, especialment en tasques de visió artificial més tradicionals o quan no hi ha GPUs disponibles.
- Veurem algunes de les tècniques més comunes.
Histogrames
- El histograma d’una imatge és la representació gràfica de la distribució dels píxels en funció de la seva intensitat.
- Els histogrames són molt útils per entendre la distribució dels píxels en una imatge.
- Son molt utilitzats en el preprocessament d’imatges per tal de normalitzar-les.
- Els histogrames es poden calcular per cada canal de color (R, G, B) o per la imatge en escala de grisos.
- S’utilitzen molt en la normalització d’imatges.
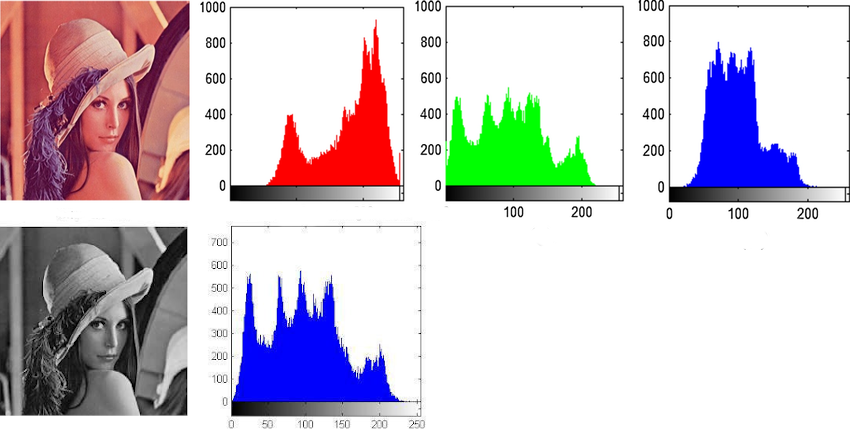
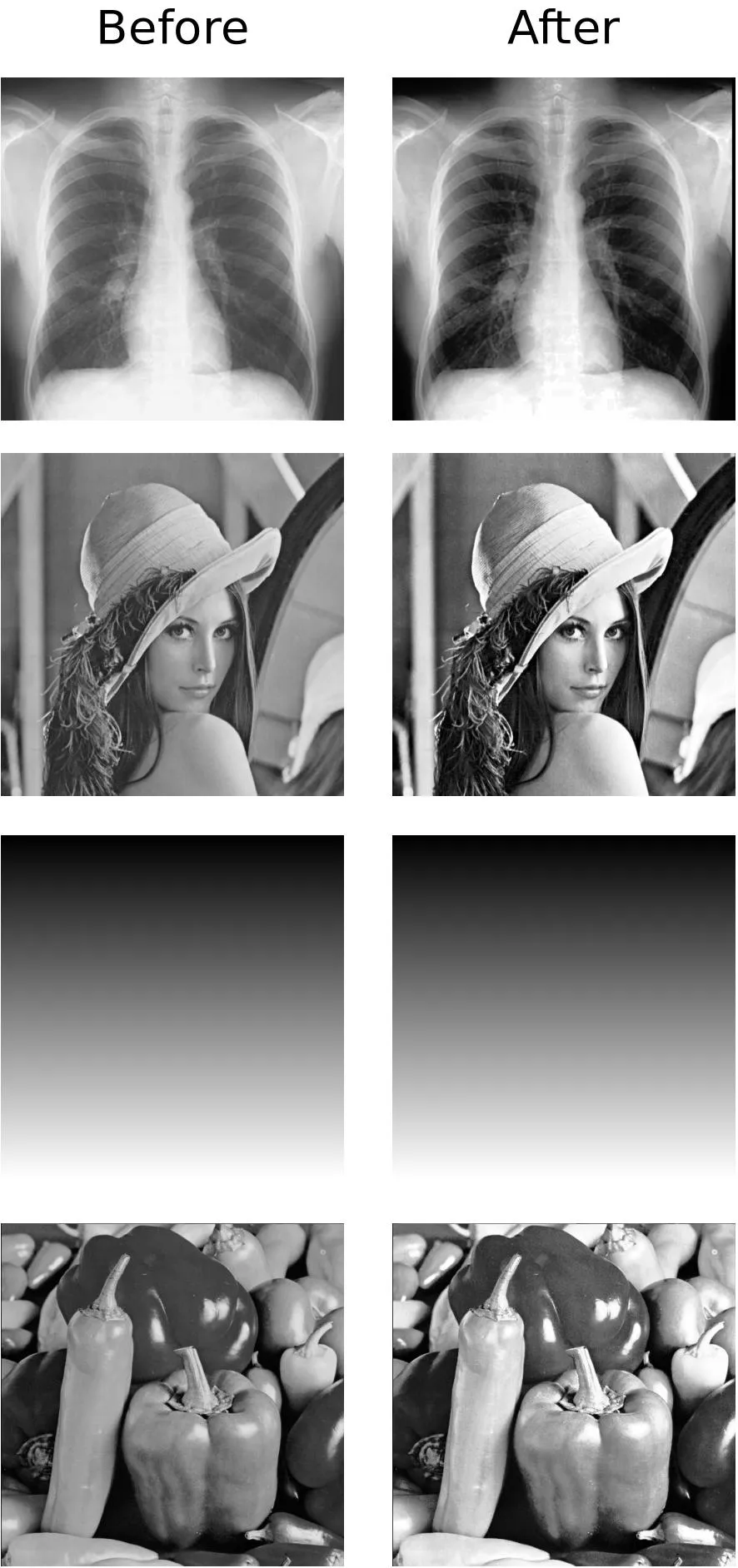
Equalització de l’histograma
- L’equalització de l’histograma és una tècnica que es fa servir per tal de millorar el contrast d’una imatge.
- L’objectiu és que la distribució dels píxels sigui més uniforme.
- Es divideix l’histograma en bins i es redistribueixen els píxels de manera que la distribució sigui més uniforme.
- El resultat poden no ser realistes, però si útils per a tasques de visió artificial.
Filtratge
- El filtratge és una tècnica que es fa servir per tal de millorar la qualitat de la imatge.
- Hi ha molts tipus de filtres, però els més comuns són els filtres de suavitzat i els filtres de realçament.
- Els filtres de suavitzat són útils per tal de reduir el soroll de la imatge.
- Els filtres de realçament són útils per tal de millorar el contrast de la imatge.
- Els filtres es poden aplicar a tota la imatge o a una regió concreta.
Filtres de suavitzat
- El soroll és un problema comú en les imatges.
- Podem reduir el soroll de la imatge aplicant filtres de suavitzat. Els més comuns són el filtre de mitjana i el de Gauss.
- Filtre de mitjana: substitueix cada píxel per la mitjana dels píxels del seu entorn.
- Filtre de Gauss: substitueix cada píxel per la mitjana ponderada dels píxels del seu entorn.
- Els píxels tenen un pes més gran com més propers estan al píxel central.
Filtres de realçament
- Els filtres de realçament són útils per tal de millorar el contrast de la imatge. Molt utilitzats en la detecció de vores.
- Els filtres més comuns són:
- Filtre de Sobel:
- Calcula el gradient de la imatge, és a dir, la intensitat de canvi de la imatge.
- Filtre de Laplace:
- calcula el laplacià de la imatge, és a dir, la segona derivada de la imatge.
- Filtre de Sobel:
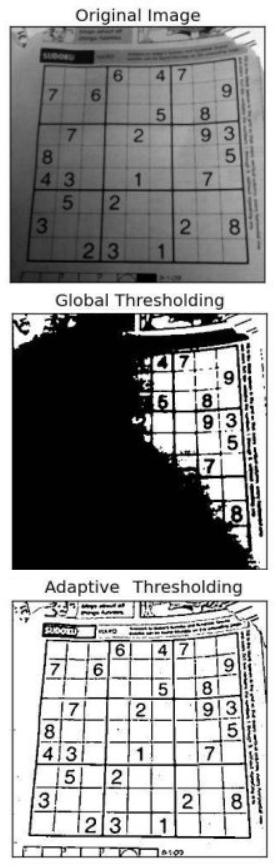
Thresholding
- El thresholding és una tècnica que es fa servir per tal de binaritzar una imatge.
- Apliquem un llindar a la imatge; els píxels que tenen una intensitat superior al llindar es converteixen en blancs i els que tenen una intensitat inferior es converteixen en negres.
- És una forma simple de segmentació: es vol separar la imatge en objecte i fons.
- Per binaritzar, sol ser millor opció que ajustar la lluminositat i el contrast.
Transformacions
- Les transformacions són tècniques que es fan servir per tal de canviar la forma de la imatge.
- Les transformacions més comunes són:, rotació, escala, desplaçament i canvis de perspectiva.
- Es divideixen en lineals i no lineals: segons si canvien la forma de la imatge.
![]()
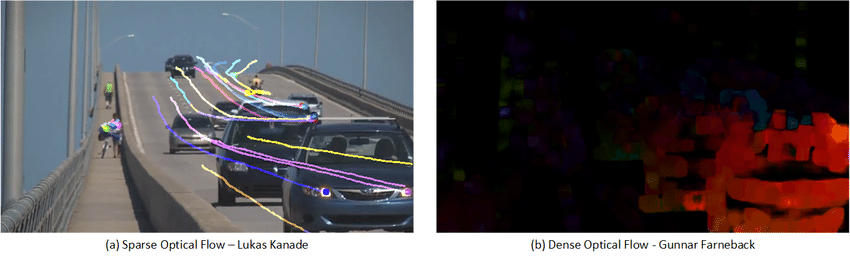
Extracció del fluix óptic (optical flow)
L’extracció del fluix òptic és pot fer amb diferents tècniques, però es poden dividir en dos grans grups:
- Discrets: es calcula el fluix òptic per punts concrets de la imatge. Rápids, però poc precisos.
- L’algorisme més comú és el de Horn-Schunck.
- Densos: es calcula el fluix òptic per cada píxel de la imatge. Més costós computacionalment, al comptar en més punts.
- Els algorismes més comú son el de Lucas-Kanade i el de Farnebäck.
Extracció del fluix óptic (optical flow)
Llibreries
- Hi ha moltes llibreries que es poden fer servir per tal de fer el preprocessament d’imatges.
- Les més comunes són:
- OpenCV: llibreria de visió artificial i machine learning.
- Per visió artificial, és la més utilitzada.
- Pillow: llibreria de processament d’imatges.
- Scikit-image: llibreria de processament d’imatges.
- Mahotas: llibreria de processament d’imatges.
- SimpleCV: llibreria de visió artificial.
- OpenCV: llibreria de visió artificial i machine learning.
Classificació d’imatges i reconeixement d’objectes
- Aquestes tasques consisteixen en identificar els objectes que hi ha a la imatge.
- La classificació d’imatges consisteix en identificar l’objecte que hi ha a la imatge.
- El reconeixement d’objectes consisteix en identificar els objectes que hi ha a la imatge i localitzar-los.
- Ambdues tasques són molt importants en visió artificial i són la base de moltes aplicacions.
Classificació d’imatges
- La majoria de sistemes actuals de classificació d’imatges es basen en l’aparença (textura, color, forma, etc.) de l’objecte; però, hi ha sistemes que també fan servir la geometria.
- Dues dificultats principals:
- Variabilitat de l’objecte: els objectes poden tenir moltes aparences diferents (dos gossos poden ser molt diferents).
- Variabilitat de la imatge: la mateixa imatge pot tenir moltes aparences diferents (llum, ombra, etc.).
- Les xarxes neuronals convolucionals són les més utilitzades per aquesta tasca.
Xarxes neuronals convolucionals
- Les xarxes neuronals convolucionals (XNN) són un tipus de xarxes neuronals, especialment dissenyades per processar dades en forma de matrius; com poden ser les imatges.
- Les xarxes neuronals convolucionals són molt bones per a tasques de classificació d’imatges.
- Com la resta de xarxes neuronals, les xarxes neuronals convolucionals necessiten ser entrenades amb moltes dades numèriques.
- Veurem a continuació com es passarán les imatges per la xarxa.
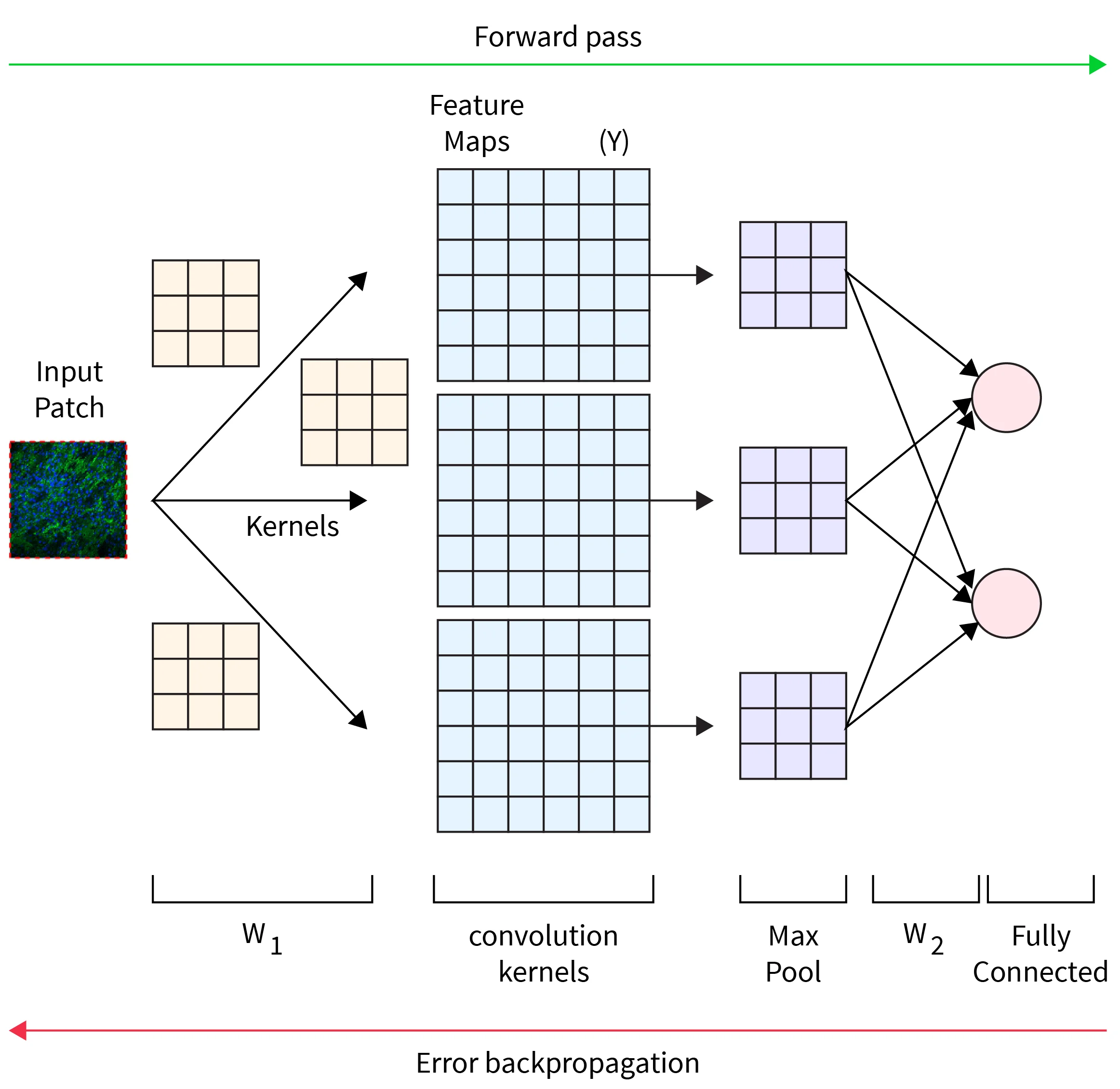
Convolució
- La convolució permet reduir la quantitat d’informació de la imatge i ens permetrá enviar a la xarxa solament les característiques més rellevants. .Aquest procés millora la precissió de la xarxa i la fa més ràpida.
- La convolució es fa amb filtres que es van aplicant a la imatge (matrius de mida petita - 3x3, 5x5, etc.).
- El resultat de la convolució es una imatge més petita que l’original, anomenada mapa de característiques.
- Si no volem reduir la mida de la imatge, podem fer servir padding.
Convolució

Funcions d’activació
- Després de la convolució, s’aplica una funció d’activació.
- Les funcions d’activació són funcions que apliquen una no linealitat a la imatge.
- La més utilitzada en xarxes neuronals convolucionals és la ReLU. Els valors negatius es converteixen en zero i els positius es mantenen igual.
- La funció d’activació és molt important per tal de que la xarxa mantingui la capacitat de generalització.
- Després de la funció d’activació, es pot aplicar un pooling.
Pooling
- El pooling és una tècnica que es fa servir per tal de reduïr la mida de la imatge encara més.
- Hi ha diferents tipus de pooling, però el més comú és el max pooling.
- Es sol utilitzar una finestra de mida petita (2x2, 3x3, etc.) i es pren el valor màxim de la finestra.
- El resultat és un mapa de característiques poolat. Aquest mapa de característiques es passarà a la següent capa.
- El pooling obliga a la xarxa a ser invariant a petites transformacions.
Regularització
- Després de les capes de convolució i pooling, es solen afegir capes de regularització.
- Les capes de regularització són capes que ajuden a la xarxa a generalitzar.
- Les capes de regularització més comunes són les capes de dropout.
- Aquestes capes eliminen un percentatge de les neurones de la xarxa, fent que no s’actualitzin en cada iteració.
- Això fa que la xarxa no es sobreajusti.
Aplanament i capes totalment connectades
- Entre les capes de regularització i les capes totalment connectades, es sol fer un aplanament.
- L’aplanament és el procés de convertir el mapa de característiques en un vector.
- Aquest vector es passarà a les capes totalment connectades.
- Les capes totalment connectades són les capes que es fan servir per tal de classificar la imatge.
- Aquestes capes són les que es fan servir per tal de reduir la dimensió del vector de característiques.
Estructura d’una xarxa neuronal convolucional
Funcionament d’una CNN (I)
- En les imatges els pixels individuals no tenen gaire sentit
- Sabem que un 8 tindrà pixels negres en la part central pero no sabem exactament on.
- Els patrons locals si que poden ser importants
- Sabem que el 0 i el 8 tenen cercles, el 1 i el 7 tenen línies verticals, etc.
- Les relacions entre patrons també son interessants
- El 1 té dues linies, el 6 una linia i un cercle, etc.
- Estratégia general: extreure patrons locals i després combinar-los per extreure patrons més globals
Funcionament d’una CNN (II)
- Les xarxes neuronals convolucionals (CNN) són una forma de fer això
- Una capa está formada per una convolució + ReLU
- La convolució mesura la similitud entre un filtre i la finestra. Cada filtre detecta un patró diferent.
- La ReLU posa a zero els valors negatius i poténcia els positius, identificant patrons.
- Si posem una capa darrere, que reba les dades d’altres capes i les combini, l’efecte serà el de tindre una finestra més gran.
Funcionament d’una CNN (III)
- Si continuem afegint capes, les finestres es faran més grans i més complexes
- Això permetrà identificar patrons més globals
- Finalment, les capes totalment connectades combinaran tots els patrons per tal de classificar la imatge
- Aquesta és la idea bàsica d’una CNN
- Extreure patrons locals
- Combinar-los per extreure patrons globals
- Classificar la imatge
Data augmentation
- El data augmentation és una tècnica que es fa servir per tal de millorar la precissió de la xarxa.
- Consisteix en augmentar la quantitat de dades d’entrenament.
- Es poden fer servir diferents tècniques per augmentar les dades:
- Rotació, Translació, Escala, Mirall, Zoom, Desplaçament, Distorsió, Filtres, Ruído, etc.
- Aquestes tècniques permeten millorar la precissió de la xarxa i evitar el sobreajust.
- A canvi de més dades, l’entrenament serà més lent.
Arquitectures de xarxes neuronals convolucionals
- Hi ha moltes arquitectures de xarxes neuronals convolucionals aprofitables, però les més conegudes són:
- VGG-16: xarxa de 16 capes. Va aconseguir un 92.7% d’exactitud en el dataset ImageNet en 2014.
- ResNet: xarxa de 152 capes, basada en la idea de residual learning. Va aconseguir un 96.4% d’exactitud en el dataset ImageNet en 2015.
- Inception: xarxa de 22 capes, basada en la idea de factorització de convolucions. Va aconseguir un 97.3% d’exactitud en el dataset ImageNet en 2015.
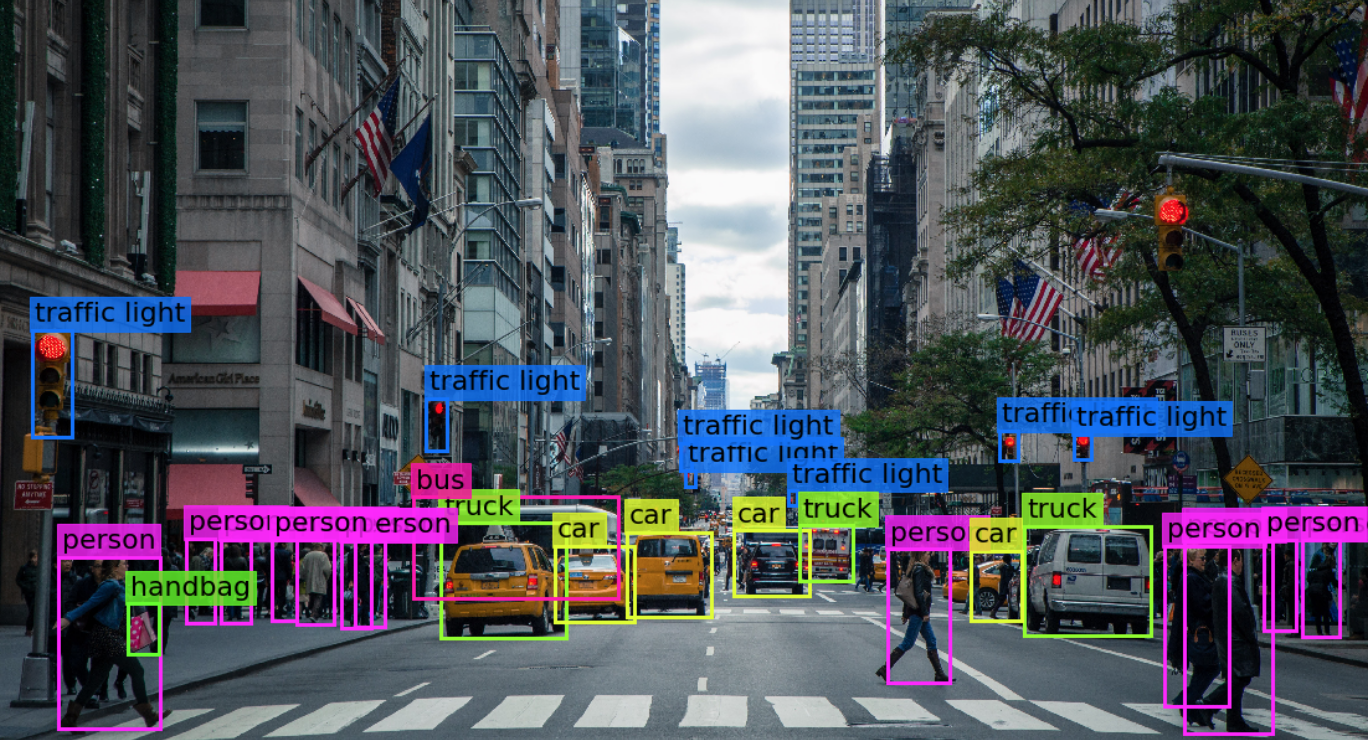
Reconeixement d’objectes
- El reconeixement d’objectes és una tasca més complexa que la classificació d’imatges.
- Mentres que la classificació d’imatges consisteix en identificar l’objecte que hi ha a la imatge, el reconeixement d’objectes consisteix en identificar els objectes que hi ha a la imatge i localitzar-los (dibuixar un rectangle al voltant de l’objecte - bounding box).
- Les classes d’objectes a identificar estaran predefinides. D’aquesta manera, el sistema podrà identificar si hi ha un gos, un cotxe, una persona, etc.
Procediment bàsic
- El procediment básic per fer el reconeixement d’objectes és el següent:
- Definim una finestra que es mourà per tota la imatge.
- Passem la finestra per tota la imatge i en cada posició passem la imatge per una XNC.
- Ens quedem en les puntuacions més altes i ignorem la resta.
- Resolem conflictes i reduïm la quantitat de bounding boxes.
Problemes en el procediment bàsic
- Forma de la finestra: si la finestra és massa gran, no podrem identificar objectes petits. Si és massa petita, no podrem identificar objectes grans.
- Selecció de finestres: si passem la finestra per tota la imatge, el procés serà molt lent. Si passem la finestra per poques posicions, podrem perdre objectes.
- Resolució de conflictes: si hi ha dues finestres que identifiquen el mateix objecte, quina és la correcta?
- Determinació del bounding box: com decidim quina és la mida i la posició del bounding box?
Selecció de finestres
- En una imatge de tamany N x N, hi ha N^4 finestres possibles.
- Les finestres amb objectes solen ser coherents en textura i color.
- Les que tallen objectes solen tindre regions o vores que travessen la finestra.
- Necessitem un mecanisme que mesure de forma eficient les probabilitats de que una finestra contingui un objecte.
- Una de les opcions és utilitzar a una RPN (Region Proposal Network).
Resolució de conflictes
- Si hi ha dues finestres que identifiquen el mateix objecte, com decidim quina és la correcta?
- Una opció és utilitzar un algorisme de non-maximum suppression.
- Aquest algorisme elimina les finestres que tenen una puntuació baixa, ordena les finestres segons la puntuació i elimina les finestres que tenen una superposició alta amb una finestra amb puntuació més alta.
- Aquest algorisme és molt eficient i permet reduir la quantitat de finestres.
Determinació del bounding box
- Com decidim quina és la mida i la posició del bounding box?
- La finestra que identifica l’objecte sol tenir una mida i una posició que no coincideixen exactament amb la mida i la posició de l’objecte.
- Per tal de determinar la mida i la posició del bounding box, es fa servir un algorisme de regressió.
- Aquest algorisme calcula la mida i la posició del bounding box a partir de la mida i la posició de la finestra, utilitzant les característiques obteses per la XNC.
Models preentrenats
- Entrenar una XNC és una tasca molt costosa.
- Sovint es fa servir models preentrenats
- XNCs entrenades amb moltes dades i que ha obtingut molt bons resultats.
- Exemples:
- Yolo: xarxa neuronal convolucional per a la detecció d’objectes en temps real. Solament necessita una passada per la imatge i és molt ràpida.
- DETR: Es basa en l’arquitetura Transformer i és capaç de detectar tots els objectes en una sola passada.
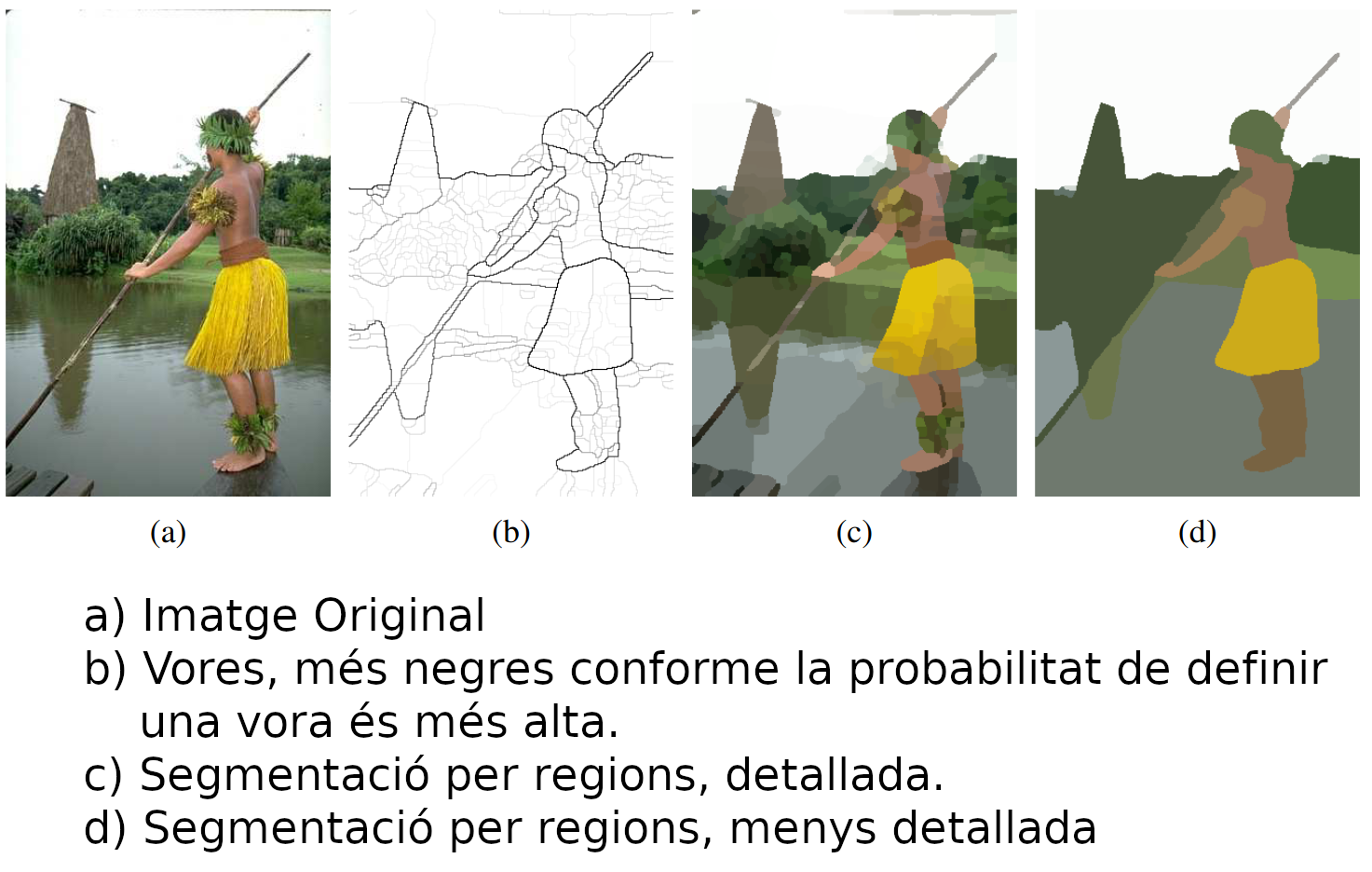
Segmentació
- La segmentació és una tasca de visió artificial que consisteix en separar la imatge en diferents regions significatives.
- L’objectiu principal de la segmentació és agrupar els píxels de la imatge en regions que tinguin alguna propietat comuna.
- Facilita la comprensió de la imatge i permet facilita tasques com la classificació, el reconeixement d’objectes, el seguiment, l’anàlisi d’escenes o la reconstrucció 3D.
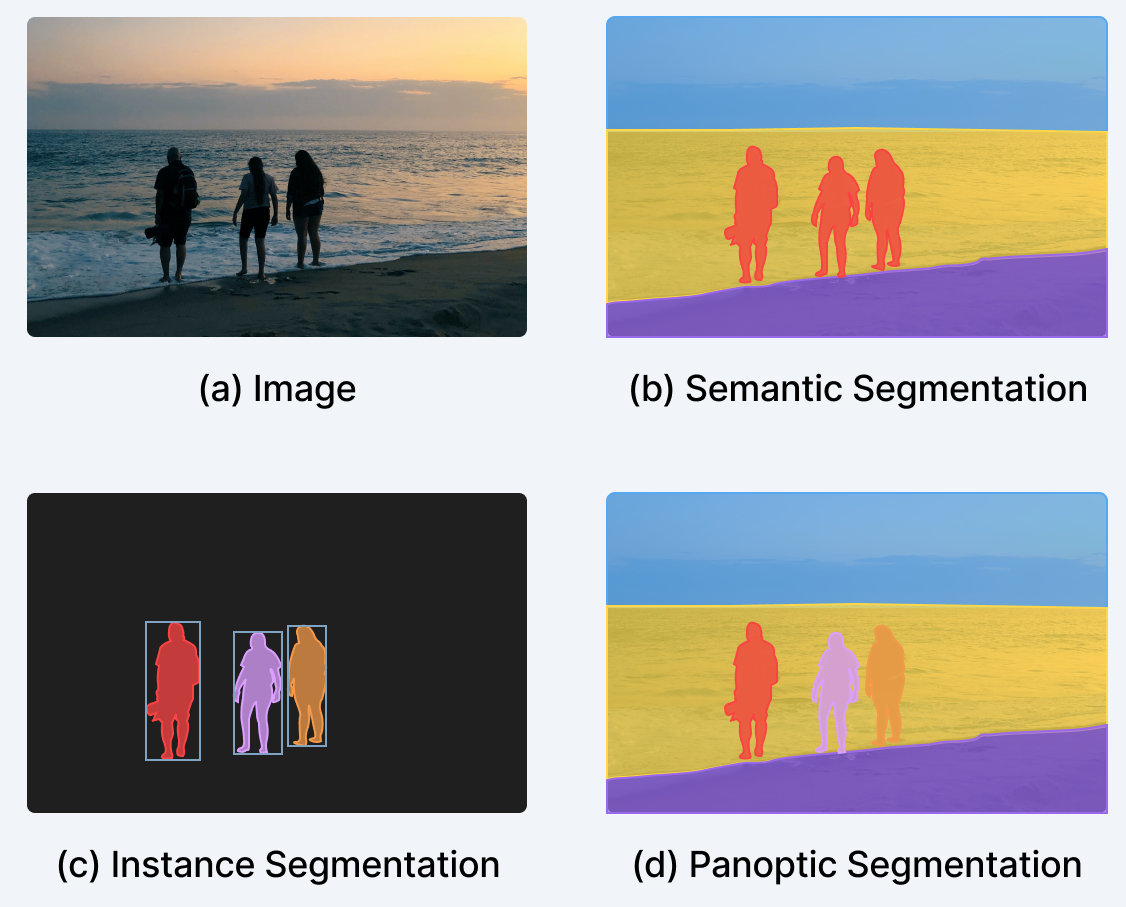
Tipus de segmentació (I)
- Tipus de segmentació:
- Segmentació binària o d’umbral: es segmenta la imatge en dues regions: objecte i fons. (Ex: thresholding)
- Segmentació per vores: es segmenta la imatge en regions separades per vores. (Ex: Canny)
- Segmentació semàntica: assignem a cada píxel una categoria predefinida. (Ex: mask-RCNN)
Tipus de segmentació (II)
- Segmentació en superpíxels: es segmenta la imatge en superpíxels (regions de píxels compactes i coherents) (Ex: SLIC)
- Segmentació d’instàncies: es segmenta en instàncies d’objectes. (Ex: mask-RCNN)
- Segmentació panòptica: es segmenta en categories predefinides, però també es segmenten les instàncies d’objectes. (Ex: mask-RCNN)
Aplicacions

Aplicacions
- Fins ara hem vist quins són els conceptes bàsics de la visió artificial i com s’apliquen en la pràctica.
- Les aplicacions s’han multiplicat en els últims anys, gràcies a l’aparició d’un munt de llibreries i models preentrenats.
- Aquesta facilitat ha fet que la visió artificial sigui una de les àrees més actives de la inte, adaptant-se a molts camps i necessitats (mèdiques, industrials, de seguretat, etc.).
- A continuació veurem algunes de les aplicacions més importants.
Percepció de persones
- Les persones són el motiu més important de les imatges.
- Entendre el que fan les persones ens permetrá crear interfícies humà-màquina més naturals, observant el que fem i actuant en conseqüència.
- Aquesta és una tasca molt complexa, que requereix la combinació de moltes tasques de visió artificial.
- S’ha avançat molt en els últims anys, però encara hi ha molts reptes per resoldre.
- A continuació veurem en que ens pot ajudar.
Usos
- Seguretat: construir sistemes de seguretat més efectius i menys intrusius.
- Urbanisme: entendre com es mouen les persones per tal de dissenyar millor les ciutats.
- Esports: analitzar videos de partits per tal de millorar l’entrenament i extreure estadístiques.
- Estalvi energètic: engegar i parar sistemes de climatització i llum en funció de la presència de persones.
Molts més, en videojocs, en la indústria, en la medicina, etc.
Detecció de la postura
- Alguns aspectes com la detecció de la postura (determinar la posició de les articulacions) estan molt avançats.
- Es relativament fàcil, ja que les articulacions tenen una forma i una posició concreta, les relacions entre les articulacions són conegudes i els efectes sobre las perspectiva són previsibles.
- Per contra, preveure el que està fent una persona és molt més difícil.

Descripció de l’acció
- La descripció de l’acció és una tasca molt més complexa.
- Consisteix en entendre què està fent una persona en una imatge.
- Moltes vegades és necessari entendre el context per tal de saber què està fent una persona.
- Aquesta dependència del context fa difícil assegurar el correcte funcionament dels sistemes.
- Ex: en una piscina es fàcil dir que algú està nedant. Ho ha sabut descriure o simplement ha detectat una piscina?
Creació d’imatges
- Les xarxes neuronals són capaces de crear imatges a partir de text o d’altres imatges.
- Un dels usos està relacionat amb el self-supervised learning.
- Quan no tenim moltes dades etiquetades, podem utilitzar xarxes per tal de crear més dades.
- Aquestes dades poden ser utilitzades per tal de millorar el rendiment de les xarxes.
- Veurem com es fa a continuació.
Autoencoder
- Un autoencoder és una arquitectura de xarxa neuronal que es fa servir per tal de reconstruir la imatge d’entrada; moltes vegades, però, amb modificacions.
- L’autoencoder té tres parts:
- Encoder: pren la imatge d’entrada i la converteix en un vector de característiques.
- Bottleneck: el vector de característiques. És la part més important de l’autoencoder.
- Decoder: pren el vector de característiques i el converteix en la imatge d’entrada.
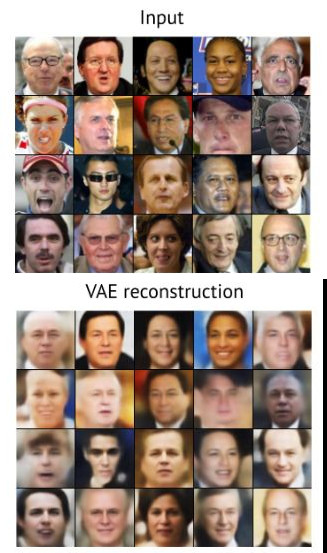
Utilitats de l’autoencoder
- Reducció de la dimensió: l’autoencoder pot ser utilitzat per tal de reduir la dimensió de la imatge.
- Denioising: al generar el vector de característiques, guardem la informació més important de la imatge, eliminant el soroll.
- Super-resolució: partim d’una imatge de baixa resolució i la convertim en una imatge de alta resolució.
- Creació d’imatges: la part del decoder pot ser utilitzada per tal de crear imatges, partint de vectors de característiques aleatoris.
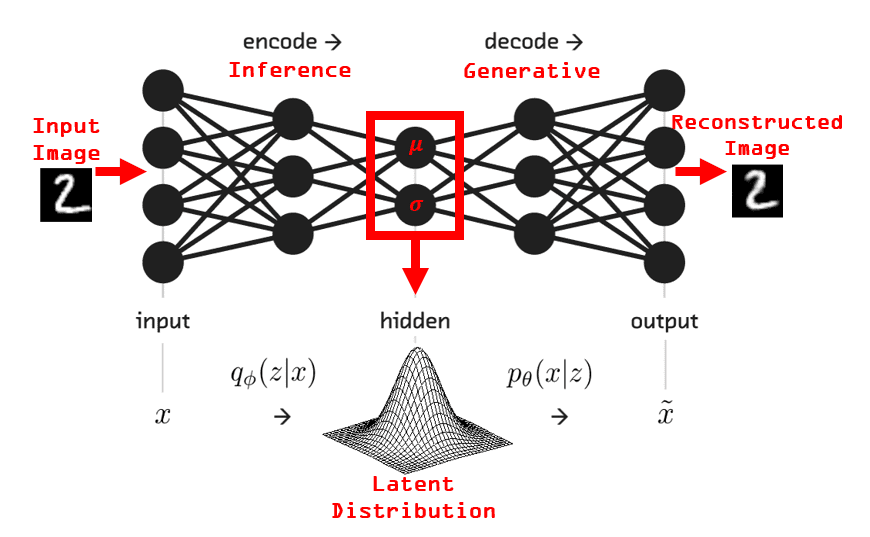
Autoencoders Variacionals
- Els autoencoders variacionals són una variant dels autoencoders que permeten generar imatges.
- El punt de partida és el mateix, però no generar un vector de característiques, sino una distribució de probabilitat que es fa servir per tal de generar imatges.
- Generarem imatges amb un aspecte similar a les imatges d’entrada, però no iguals.
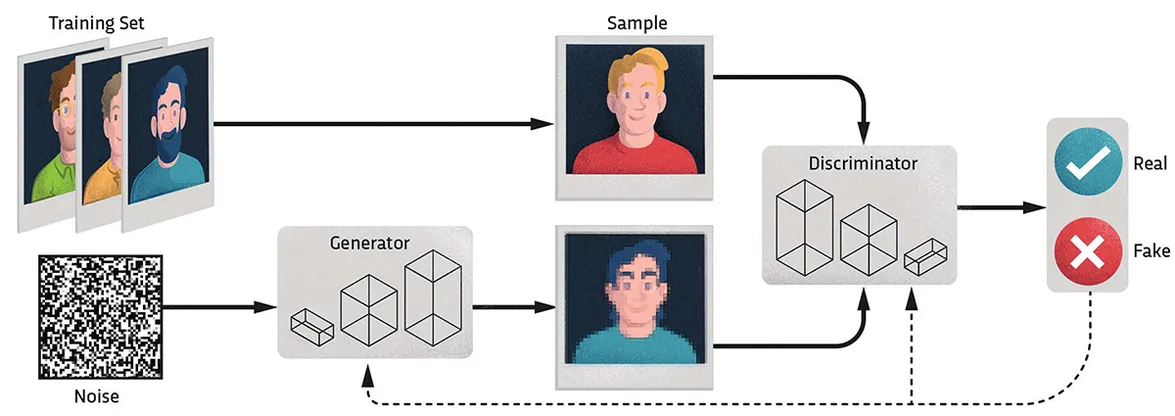
GANs (Generative Adversarial Networks)
- Les GANs són un tipus de xarxes neuronals que es fan servir per tal de generar imatges.
- Les GANs estan formades per dues xarxes:
- Generador: genera imatges a partir de vectors de característiques aleatoris.
- Discriminador: intenta distingir entre imatges reals i imatges generades.
- Les dues xarxes es entrenen enfrontades. El generador intenta enganyar el discriminador i el discriminador intenta no ser enganyat.
GANs (Generative Adversarial Networks)
Control del moviment
- Un dels usos més importants de la visió és el de manipular objectes (agafar-los, moure’ls, etc.) i navegar evitant obstacles. Els vehicles autònoms són un dels exemples més clars, i impliquen una sèrie de tasques:
- Control lateral: mantenir-se dins del carril.
- Control longitudinal: mantenir la distància de seguretat.
- Evitar obstacles: detectar i evitar possibles vehicles, vianants, etc.
- Respectar senyals: Incloent-hi les llums dels semàfors, guàrdies urbans, etc.
Procediment
- El Procediment bàsic consistirà en la generació d’una seqüència de comandes (acceleració, frenada, gir, etc.) que permetin al vehicle complir les tasques anteriorment esmentades.
- Caldrà un model del mon i dels objectes que hi ha al voltant. Teòricament, aquest model es pot crear solament a partir de dades visió, però no és senzill. Ex: Captar la velocitat d’un vehicle a partir de la imatge és difícil.
- En la pràctica, es fa servir una combinació de dades de visió i de sensors (radar, lidar, etc.).
Model del mon
- El model del mon és una representació del mon que permet al vehicle preveure el que passarà en el futur.
- Ex: en verd es mostra els llocs on el vehicle pot anar i els objectes es mostren envoltats per una caixa vermella.

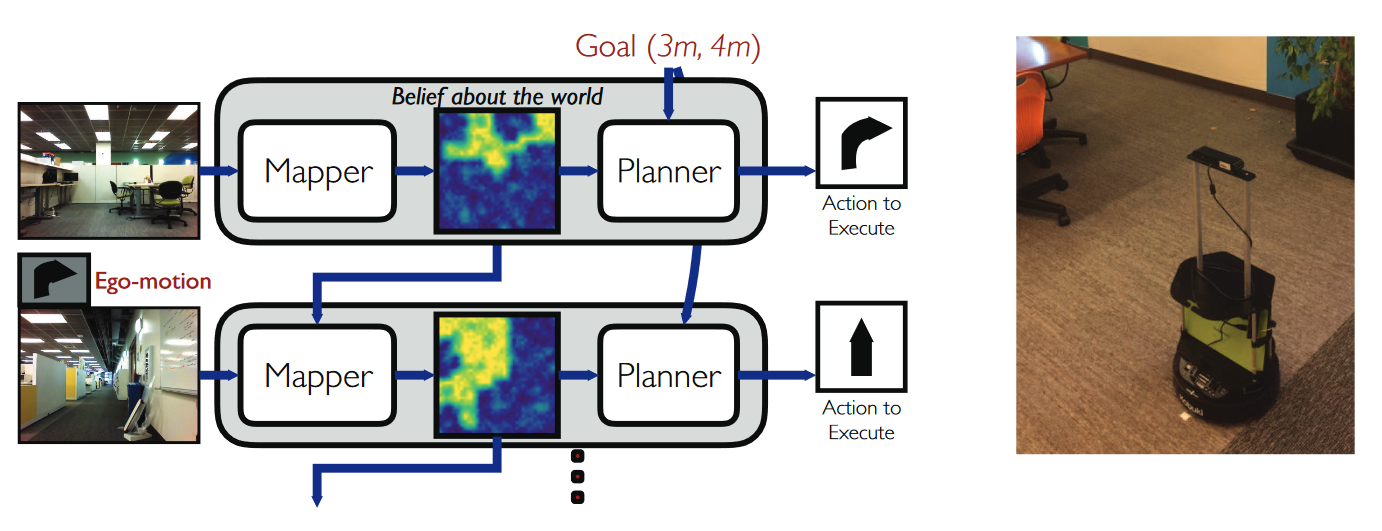
Navegació autònoma
- La tasca de navegació autònoma consisteix en moure’s per un entorn sense la intervenció humana.
- Es sol dividir en dues tasques:
- Mapeig: crear un mapa de l’entorn. Algunes de les tècniques més comunes són el SLAM i el Simultaneous Localization and Mapping.
- Planificació de trajectòries: Una vegada el robot té un mapa 3D de l’entorn i sap on és, l’objectiu és planificar una trajectòria que el porti al seu destí sense col·lisions.
Mapeig i Planificació de trajectòries
Seguiment d’objectes
- El seguiment d’objectes és una tasca de visió artificial que consisteix en seguir una sèrie d’objectes en una seqüència d’imatges.
- La complexitat del seguiment s’origina de la quantitat d’imatges que poden haber en un video.
- 24 fps x 60 s x 60 min = 86400 imatges en una hora.
- Si contem 8 - 10 objectes = més de 800000 objectes.
- Aquesta tasca és molt important en aplicacions com la vigilància, robots autònoms,etc.
Tipus de seguiment
- Tractarem els següents tipus de seguiment:
- Seguiment d’un sol objecte (single object tracking - SOT)
- Seguiment de múltiples objectes (multiple object tracking - MOT)
- Seguiment de múltiples objectes sense classe semi-supervisat. Versió estesa de SOT.
- Segmentació d’objectes en video (VOS).
- Els dos primers són els més comuns i son els que tractarem en més detall.
Seguiment d’un sol objecte
- El seguiment d’un sol objecte consisteix en seguir un sol objecte en una seqüència d’imatges, basant-nos en una anotació manual inicial.
- Al primer frame anotat l’anomenen template i a cadascún dels següents search area
- Les xarxes neuronals per aquestes tasques están entrenades per seguir qualsevol objecte del primer frame
- S’anomenen Xarxes Neuronals Agnòstiques a la Classe (Class Agnostic Neural Networks - CAN).
Seguiment de múltiples objectes - Definició
- El seguiment de múltiples objectes NO consisteix simplement en repetir SOT pero per a cada objecte.
- En realitat consisteix en identificar i seguir tots els objectes d’una sèries de classes predefinides.
- L’usuari no pot corregir al model ni aportar feedback.
- L’us més habitual és el d’aplicar el model a un video i després extreure estadístiques
- Ex: quantes persones passen per un carrer en una hora.
- No es tant utilitzat per etiquetatge

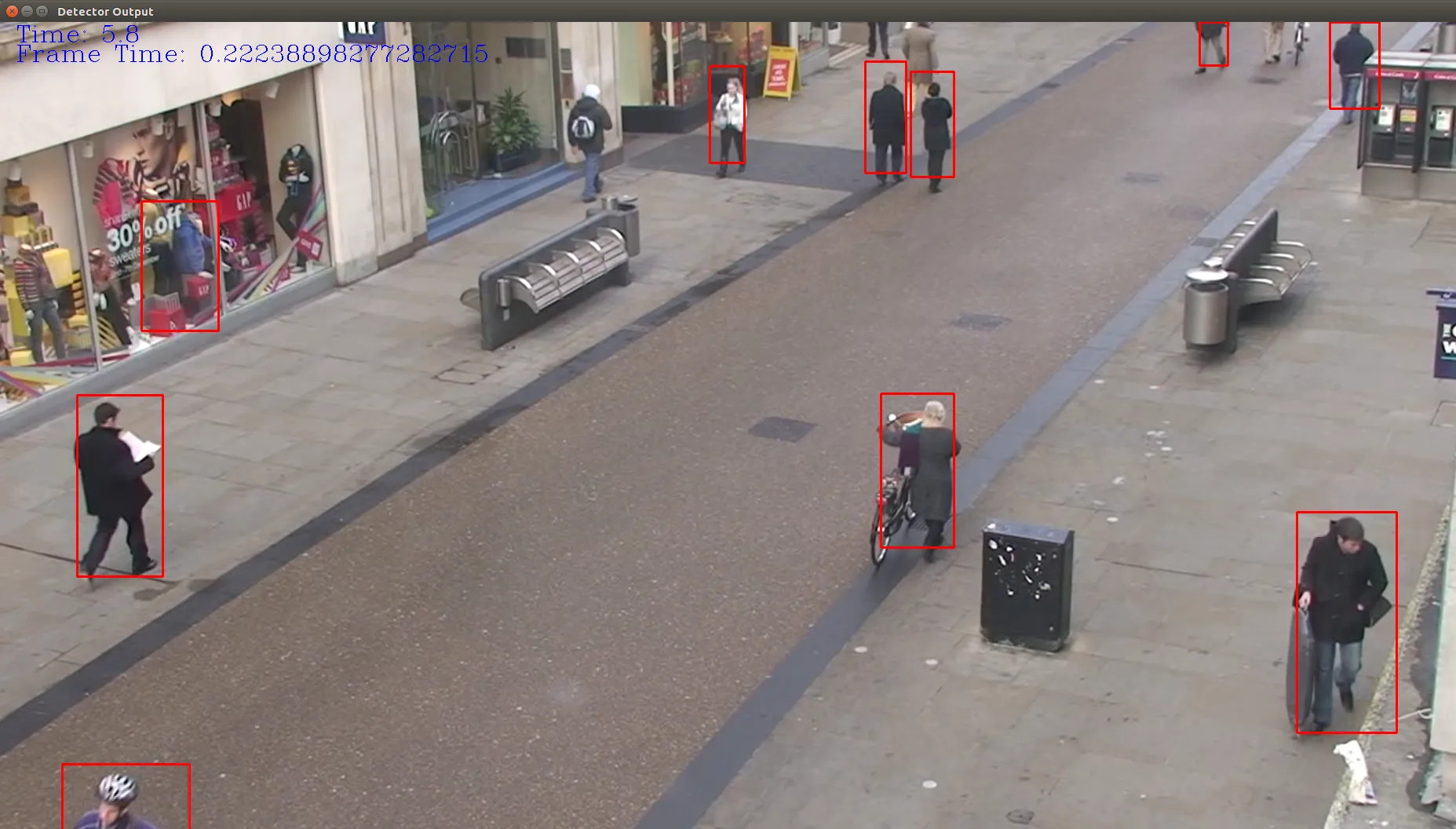
Seguiment de múltiples objectes - Funcionament
- Dues fases, Detecció (identificar tots els objectes en una imatge) i Associació (associar els objectes detectats en una imatge amb els objectes detectats en la imatge anterior - tracklets).
- Hi ha xarxes neuronals que poden fer les dues tasques alhora de forma eficient. Per entrenar-les, però, es fa servir un dataset de video etiquetat i son molt costosos de crear.
- Es més freqüent fer servir una xarxa per la detecció, i una altra per la identificació i re-identificació: Tracking by detection. El rendiment, però, és més baix.
Tracking by detection
![]()
Identificació i re-identificació
- La identificació és la tasca d’assignar un identificador únic a cada objecte detectat.
- La re-identificació és la tasca d’associar el mateix identificador a un objecte detectat en diferents imatges.
- Aquesta es la tasca més difícil, ja que els objectes poden canviar molt en aparença. Ex: una persona que es tapa la cara.
- Alguns dels algorismes més comuns són:
- ByteTrack: algorisme simple i ràpid.
- FairMOT: algorisme més complexe pero més precís.
Reconeixement facial
- El reconeixement facial és una tasca de visió artificial que consisteix en identificar una persona a partir d’una imatge o un video.
- Aquesta tasca és molt important en aplicacions com la seguretat, control d’accés, vigilància, etc.
- A pesar de que altres metodes com les empremtes digitals o l’iris són més segurs, el reconeixement facial és més còmode i menys intrusiu.
- Això ha fet que s’hagi mantingut la investigació en aquesta àrea, i que s’hagi aconseguit un alt rendiment.
Funcionament
- El funcionament del reconeixement facial és molt similar al de la classificació d’imatges.
- La diferència principal és que en lloc de classificar l’objecte que hi ha a la imatge, es classifica la persona.
- Això fa que el reconeixement facial sigui una tasca més complexa que la classificació d’imatges, ja que les persones poden tenir moltes aparences diferents en funció de la llum, la posició, l’expressió, etc.
- Les persones també poden canviar molt en el temps, per lo que haurem de buscar característiques invariants.
Enfocaments per al reconeixement facial
- Basats en la geometria: analitzen estadísticament la geometria de les característiques facials.
- Enfocament holístic: analitzen la imatge sencera i utilitzen les relacions entre les característiques.
- Basats en models: creen un vector de característiques a partir de la imatge i el comparen amb vectors de característiques predefinits.
- Basats en xarxes neuronals: utilitzen xarxes neuronals convolucionals per classificar la imatge; fins fa poc, però, no era factible per la gran quantitat de dades necessàries.
Models avançats en visió artificial
Transformers i Models de Difusió
Transformers en visió artificial
- Els Transformers, originàriament dissenyats per a processament del llenguatge natural (NLP), s’han adaptat amb èxit a la visió artificial.
- ViT (Vision Transformers): Un dels models més populars que aplica l’arquitectura Transformer a imatges.
- Divideix la imatge en patxos (patches) i els tracta com a seqüències.
- Utilitza atenció multi-cap (multi-head attention) per capturar relacions globals entre els patxos.
- Aplicacions:
- Classificació d’imatges.
- Detecció d’objectes.
- Segmentació semàntica.
Visió per Transformers (ViT)
- Com funciona:
- Divideix la imatge en petits patxos (ex: 16x16 píxels).
- Aplana cada patx i el projecta a un espai latent mitjançant una capa lineal.
- Afegeix embeddings de posició per mantenir la informació espacial.
- Passa la seqüència de patxos per un Transformer encoder.
- Avantatges:
- Captura dependències a llarg termini entre regions de la imatge.
- Escala millor amb dades a gran escala.
Visió per Transformers (ViT)
Models de Difusió
- Els Models de Difusió són una família de models generatius que han demostrat un gran potencial en la generació d’imatges d’alta qualitat.
- Funcionament:
- Es basen en un procés de difusió que afegeix soroll a les dades (imatges) durant múltiples passos.
- Després, el model aprèn a revertir aquest procés per generar imatges a partir de soroll.
- Exemples populars:
- DALL-E: Genera imatges a partir de descripcions textuals.
- Stable Diffusion: Un model eficient que genera imatges d’alta qualitat amb menys recursos computacionals.
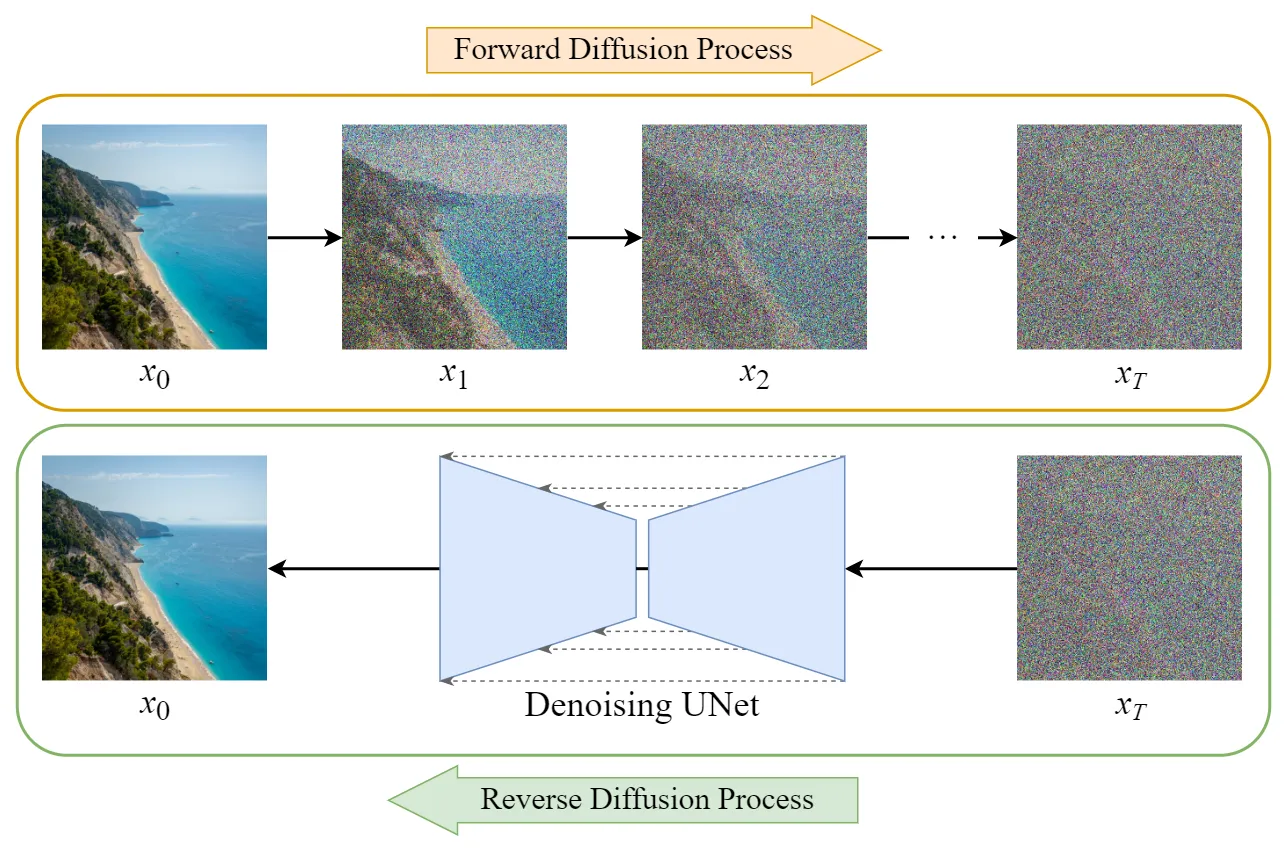
Procés de Difusió
- Forward process:
- Afegeix soroll gaussià a la imatge en passos incrementals.
- La imatge es converteix en soroll pur després de múltiples passos.
- Reverse process:
- El model aprèn a eliminar el soroll pas a pas per reconstruir la imatge original.
- Generació:
- Es comença amb soroll pur i s’aplica el procés invers per generar noves imatges.
Procés de Difusió
Aplicacions dels Models de Difusió
- Generació d’imatges:
- Crear imatges realistes a partir de descripcions textuals.
- Ex: “Un gos assegut en un camp amb un cel blau”.
- Edició d’imatges:
- Modificar imatges existents afegint o eliminant objectes.
- Super-resolució:
- Millorar la resolució d’imatges de baixa qualitat.
- Art generatiu:
- Crear obres d’art úniques mitjançant la combinació d’estils i conceptes.
Comparativa entre Transformers i Models de Difusió
| Característica | Transformers | Models de Difusió |
|---|---|---|
| Enfocament | Atenció global i seqüencial. | Procés iteratiu de soroll. |
| Aplicacions principals | Classificació, detecció. | Generació i edició d’imatges. |
| Complexitat | Alta (requereix molts recursos). | Moderada (més eficient). |
| Escalabilitat | Excel·lent amb dades grans. | Bona, però menys que ViT. |
Futur de la visió artificial
- Integració de models:
- Combinar Transformers i Models de Difusió per a tasques més complexes.
- Eficiència computacional:
- Desenvolupar models més lleugers per a dispositius mòbils i IoT.
- Aplicacions emergents:
- Realitat augmentada, medicina personalitzada, i vehicles autònoms.
- Ètica i privadesa:
- Garantir que els models de visió artificial es desenvolupin de manera responsable.